
位置決め制御 FX5UC⇔ステッピングモータ
PREFACE

位置決め制御
今回は・・・
PLCからステッピングモーターを
位置制御の基本動作を
検証していきます。
構成
PLC FX5UC-32MT/DSS-TS
三菱電機製
※(PNPソース出力)
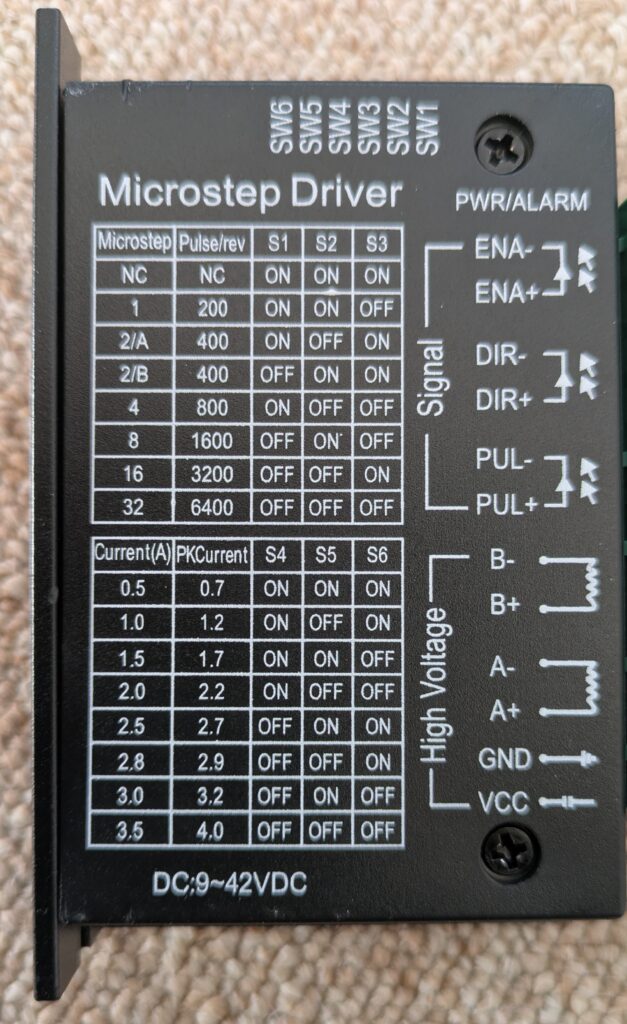
ドライバー Micostep Driver
モーター US-17HS4401S
※(ドライバー、モーターメーカー不明)
DOCUMENT
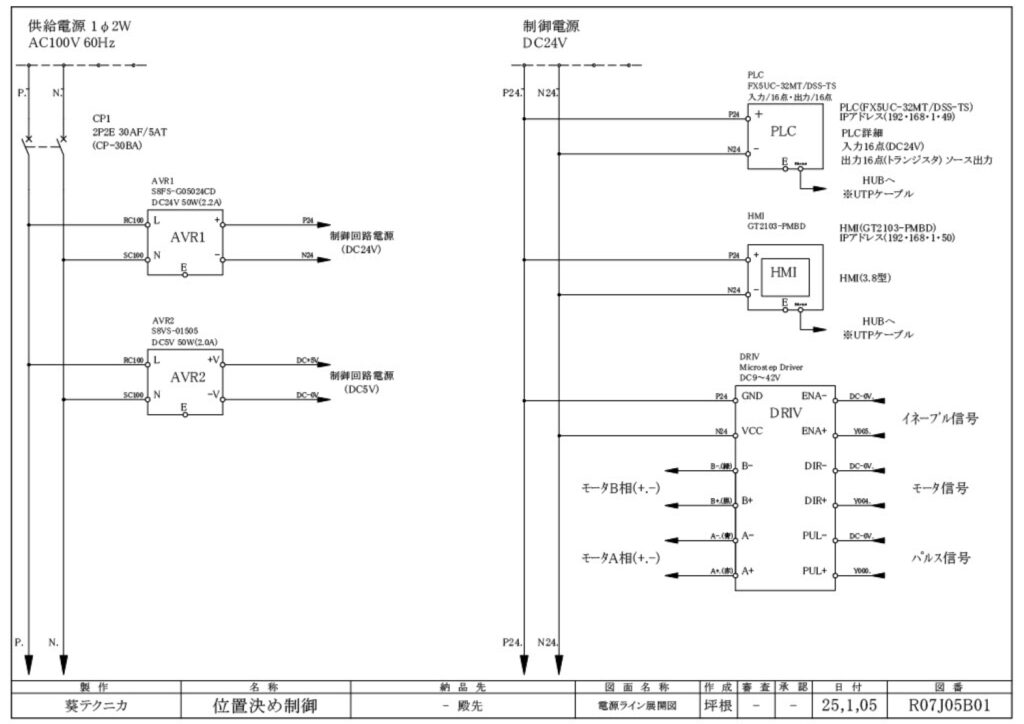
今回は、Micostep Driverの制御出力
DC5V電源が必要です。
DC24V制御の場合
抵抗を入力信号に割り込ませても良いのですが・・・
参考に
抵抗 2K2Ω×3本※各信号に1本必要
DC24VからDC5Vに変圧します。
SETTING 1 MICOSTEP DRIVER
構成
単純に1対1
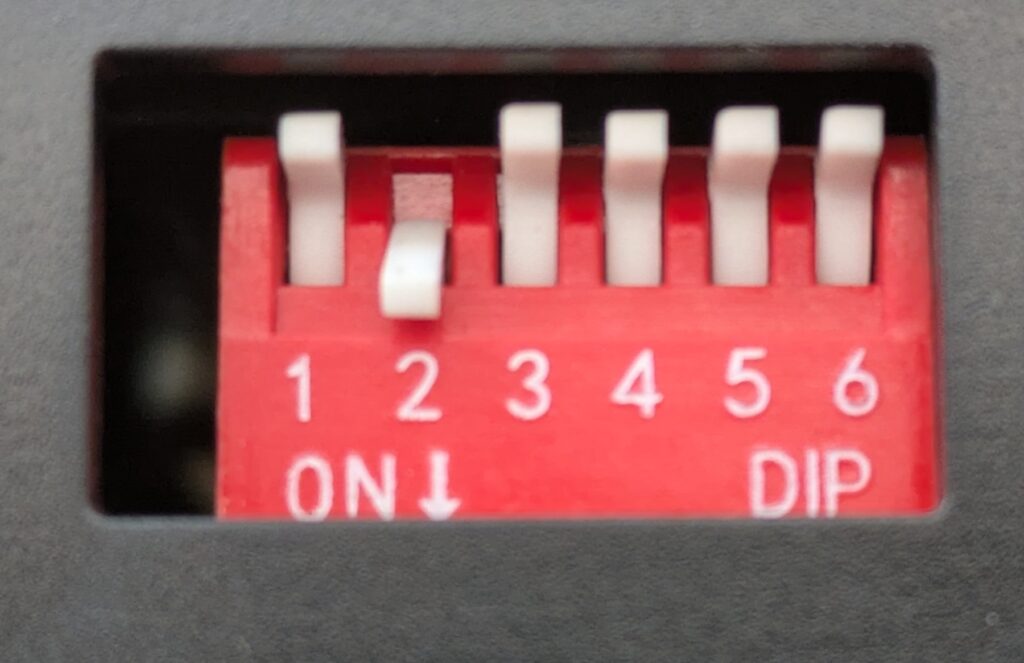
設定
Micostep Driver
パラメータ設定
SW1 OFF
SW2 ON
SW3 OFF
SW4 OFF
SW5 OFF
SW6 OFF
パルス 1600
角度 0.225°
詳細
今回は、Micostep Driver
パラメータ設定は初期設定で運転しました。
パルス 1600
基本ステップ角
0.225°=360°÷1600ステップ
角度 0.225°
回転速度
3.75(r/min)=
(0.225°÷360°)×100Hz(パルス速度)×60s(60秒)
3.75(r/min)=1分間に約4回転
例
1000Hzでは 1分間に37.5回転 約38回転
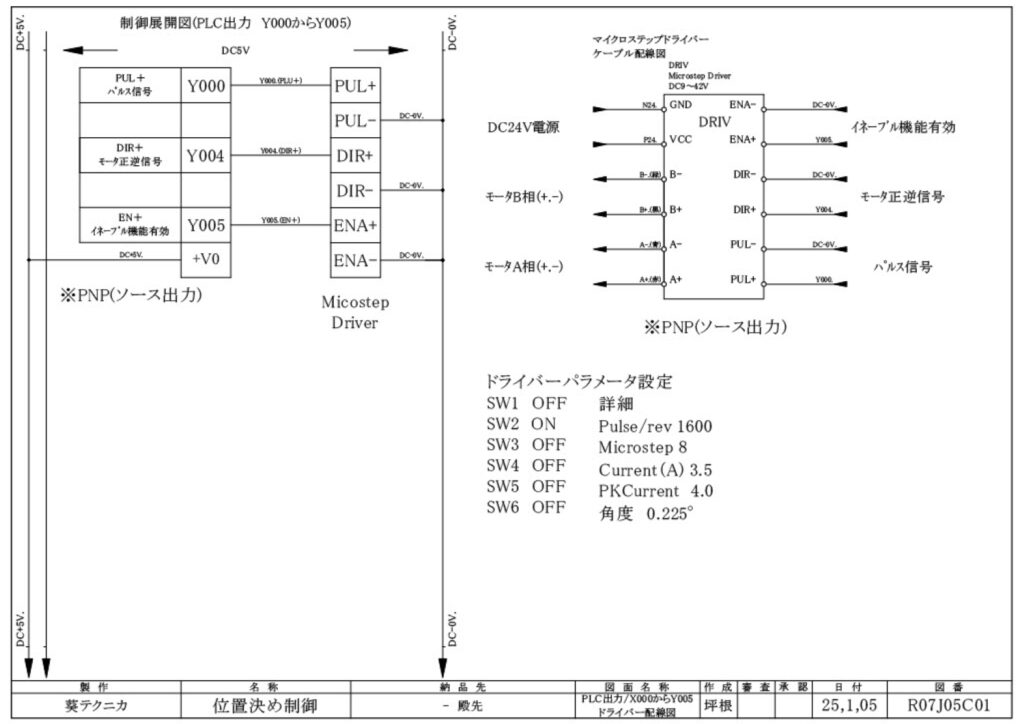
接続説明
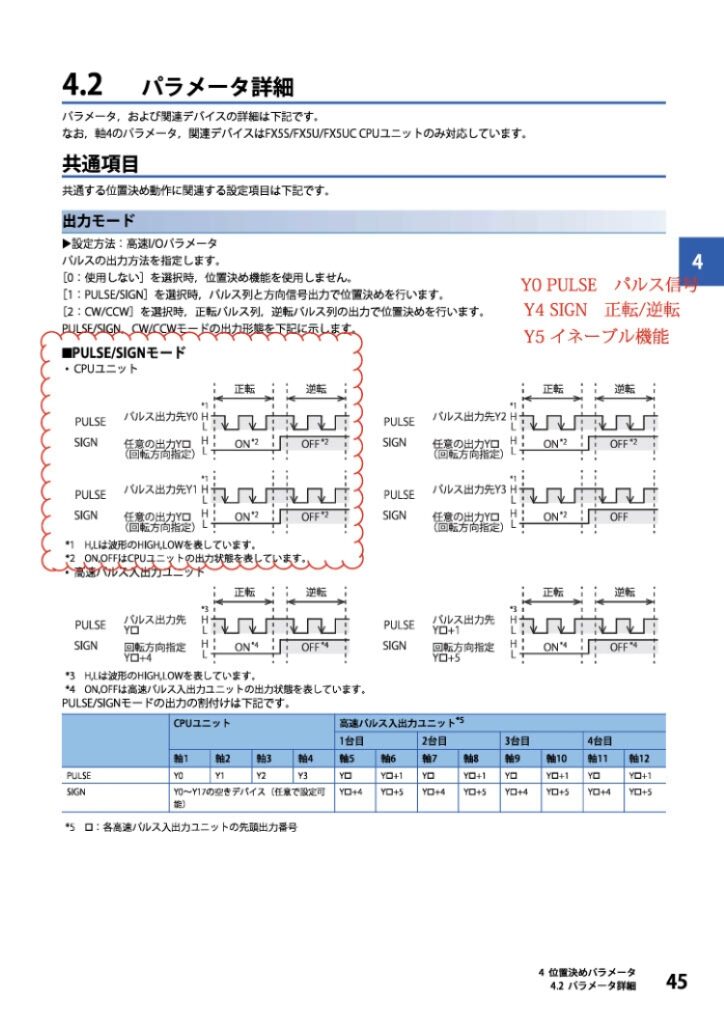
ENA イネーブル機能
PUL パルス信号
DIR モータ正逆信号
B B相(モータ)
A A相(モータ)
GND/VCC DC電源9~42V
詳細はDOCUMENT項目
制御展開図配線図に記載しています。
SETTING 1 FX5UC
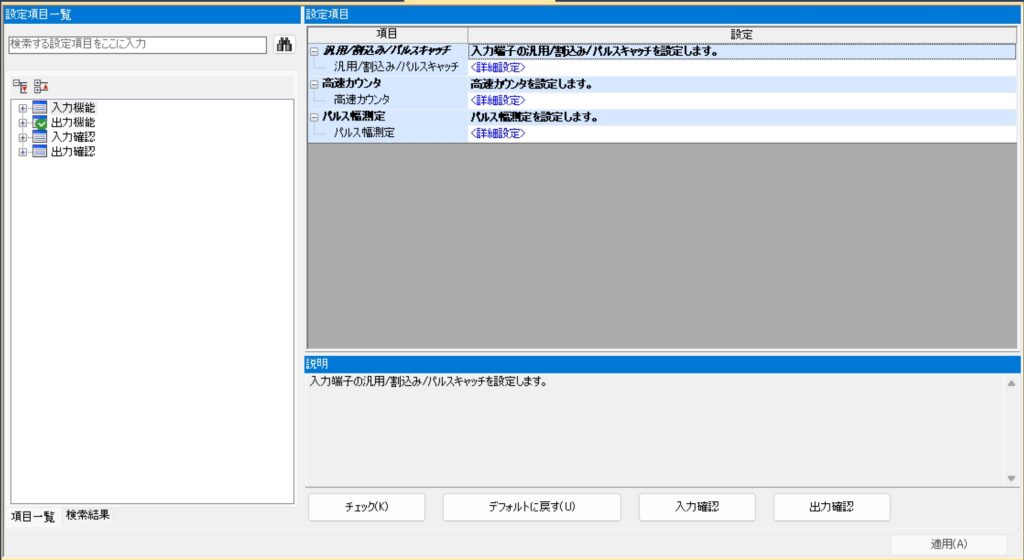
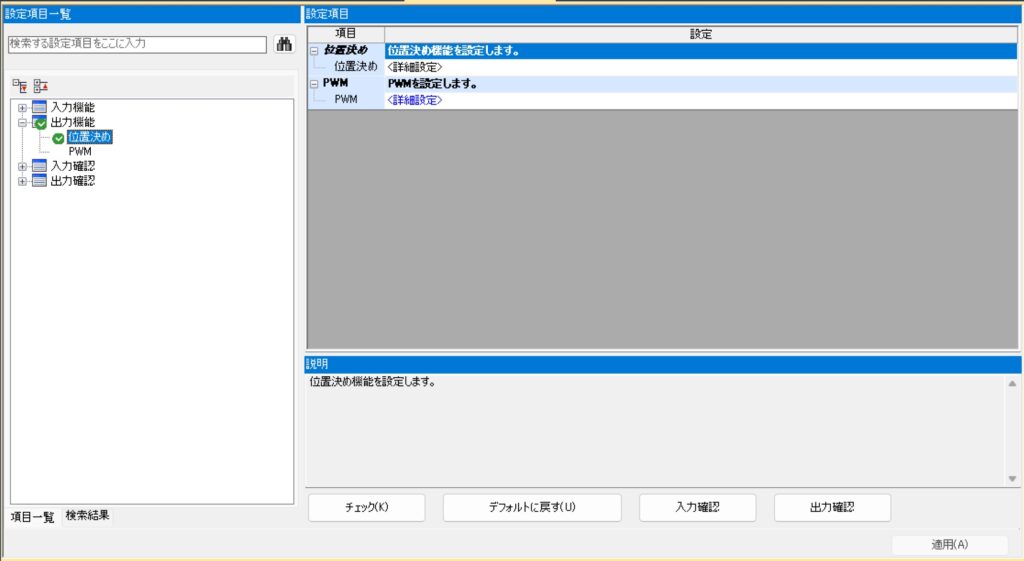
ユニットパラメータから
高速I/Oの項目を選択
次に出力機能を選択
今回は入力機能は使用しないので
出力機能だけで制御します。
SETTING 2 FX5UC
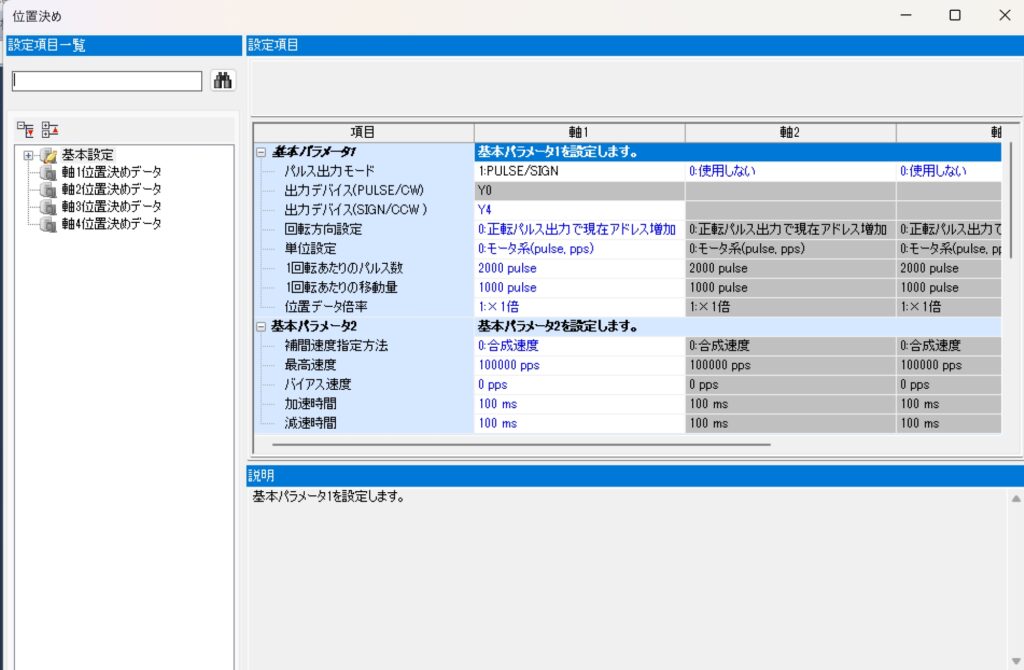
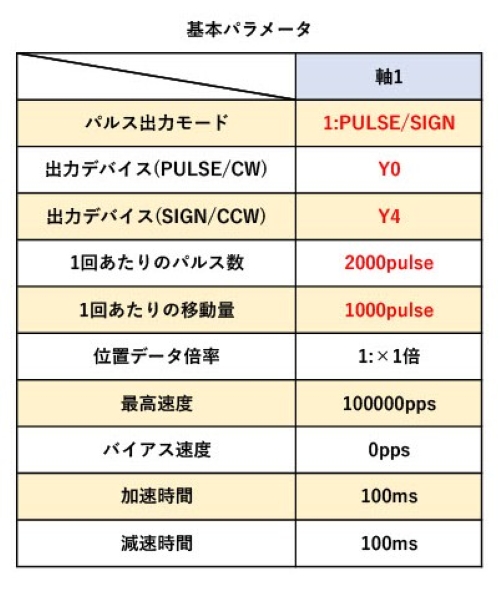
位置決め設定
重要設定箇所は
パルス出力モード 1:PULSE/SIGN
出力デバイス(PULSE/CW) Y0
出力デバイス(SIGN/CCW) Y4
1回あたりのパルス数 2000pulse
1回あたりの移動量 1000pulse
その他は基本設定で様子をみながら
個々を設定していきます。
WRITING INSTRUCTION1
FOR REFERENCE LADDER
使用命令
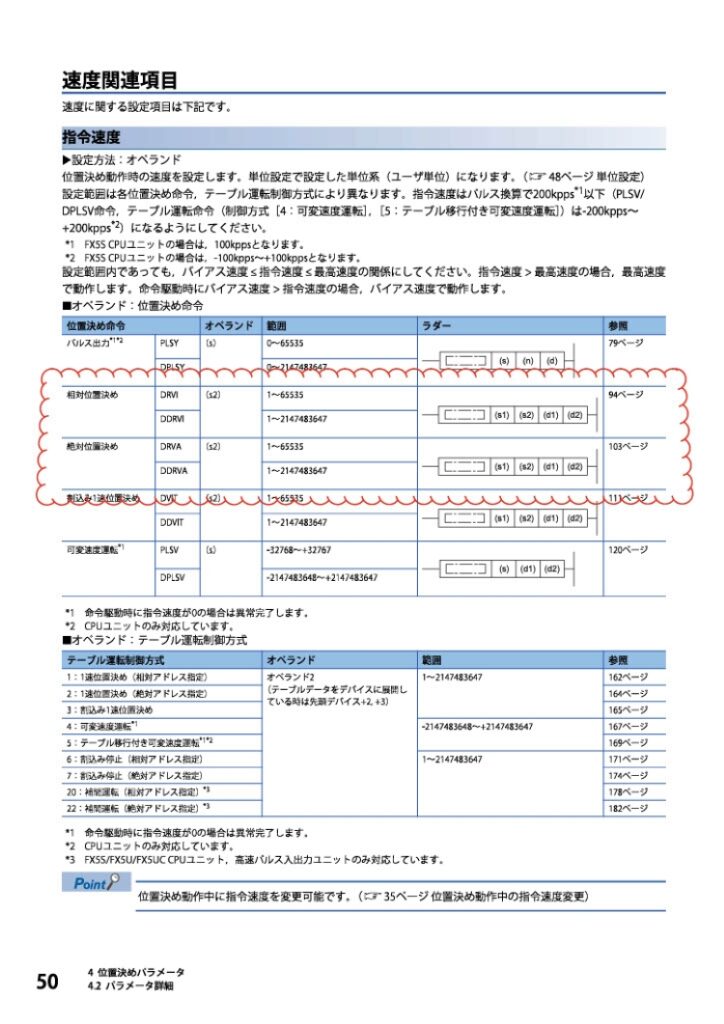
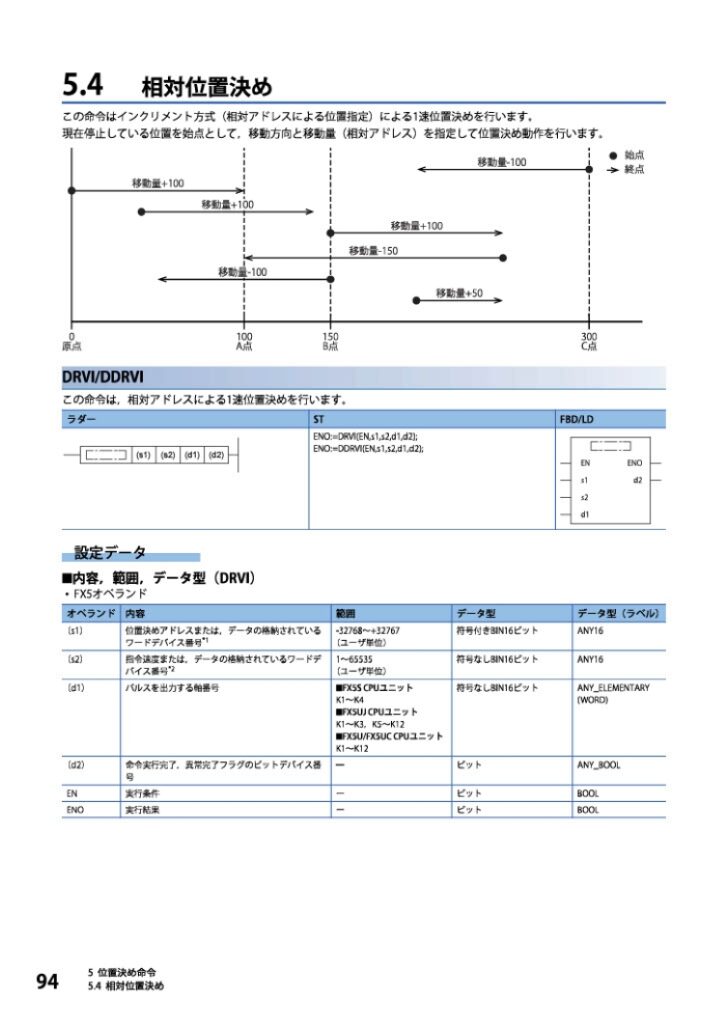
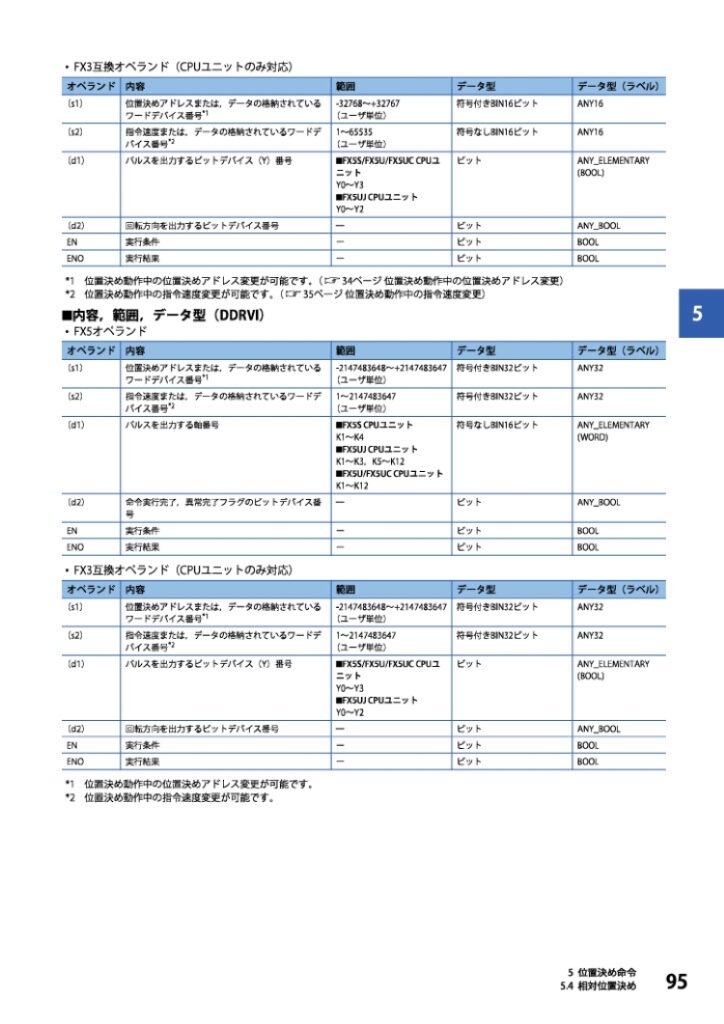
専用命令 相対位置決め DDRVI(32ビット)
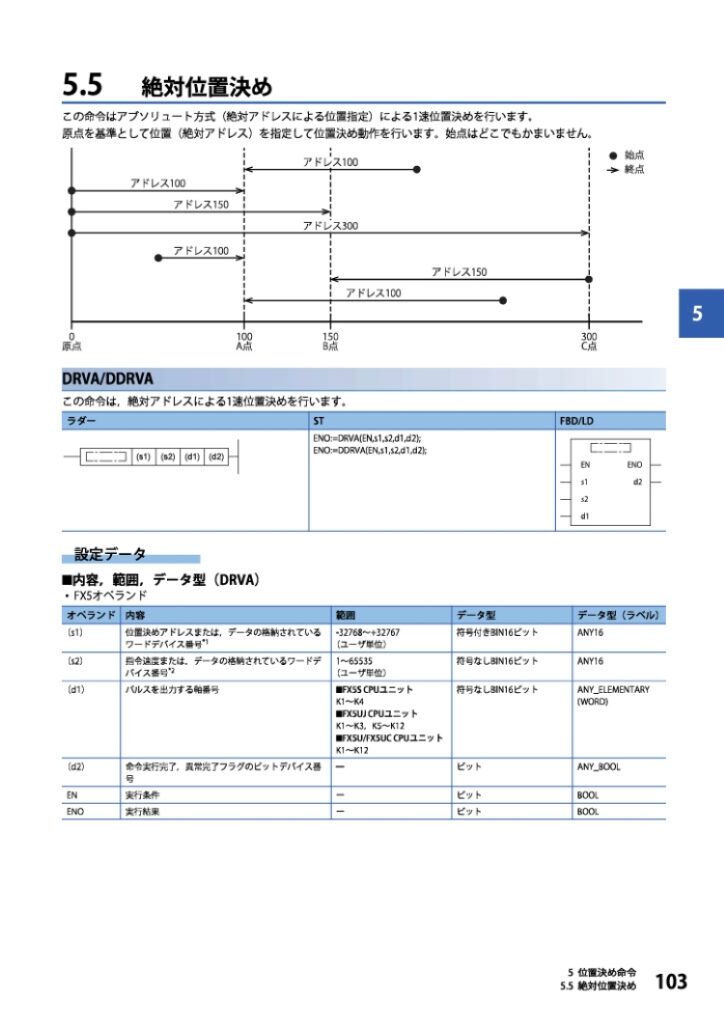
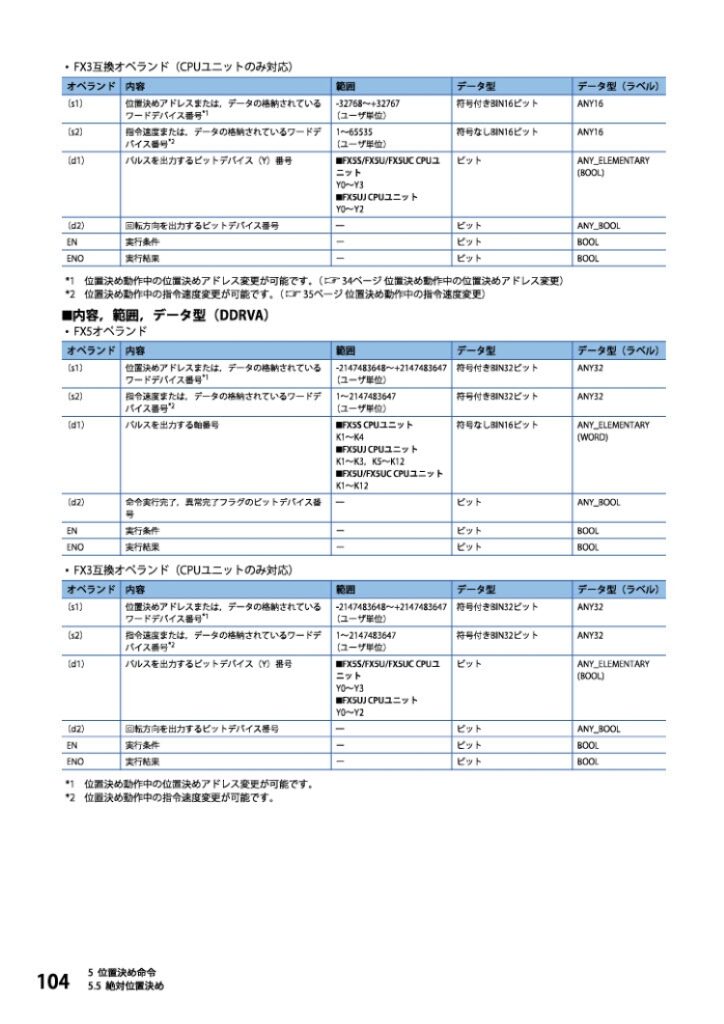
専用命令 絶対位置決め DDRVA(32ビット)
専用命令を活用してプログラムを走らせ・・・
Micostep Driverを制御します。
参照
MELSEC iQ-F
FX5ユーザーズマニュアル
(位置決め編CPUユニット内蔵/高速パルス入出力ユニット)
WRITING INSTRUCTION2
DEMONSTRATION
動作確認
ジョグ動作 +/ー
※ジョグ動作はフリーなので、止まるまでは
数値は関係なく、回り続けます。
原点復帰
※原点位置は仮定として0地点を設定
各ポジション動作
項目4ポジション
設定した数値でモータ停止
SUMMARY
今回は・・・
位置決め制御を取上げました。
Micostep Driverは
説明書等は無し・・・
癖も無く、無事動作確認できました。
用途は3Dプリンター用・・・
XYZ軸を揃えれば・・・
本格的な物が製作できそうです・・・
話が変わりますが
あと、金属加工
マシニング等・・・
位置決め制御は奥が深く難しい・・・
数㎜の精度を要求
精度が品質に影響します・・・
加工時間を短縮し
良質な製品を生産していきます。
機械加工用途を深堀して、
制御に反映していくので・・・・
知らないと大変な事になります・・・
今回は、初歩的な物を学習しました。
1軸でしたが・・・
まだまだ勉強中です・・・
雑な説明でしたが・・・
最後までお読みいただきありがとうございました。

