
位置決め制御 QD75P2⇔1軸ステッピングモータ補足
PREFACE

位置決め制御
今回は・・・
前回の事柄に追加補足
PLCからステッピングモーターを
位置制御の基本動作を
検証していきます。
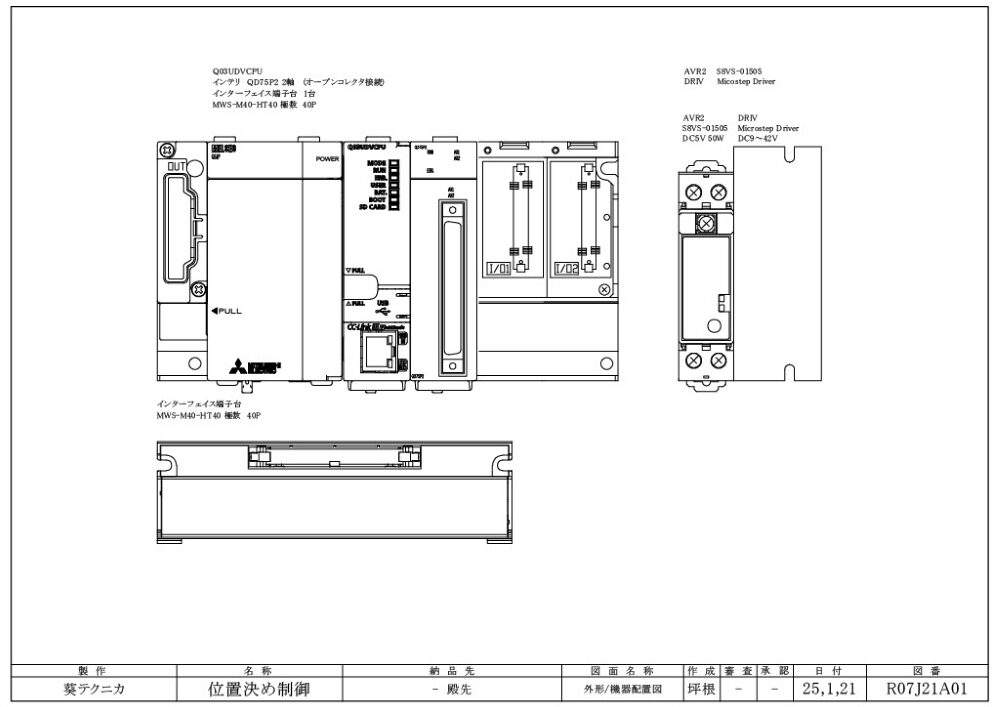
構成
CPU Q03UDVCPU(三菱電機製)
インテリ QD75P2
※QD75P2 発売状況 生産終了
生産終了日 2021年09月
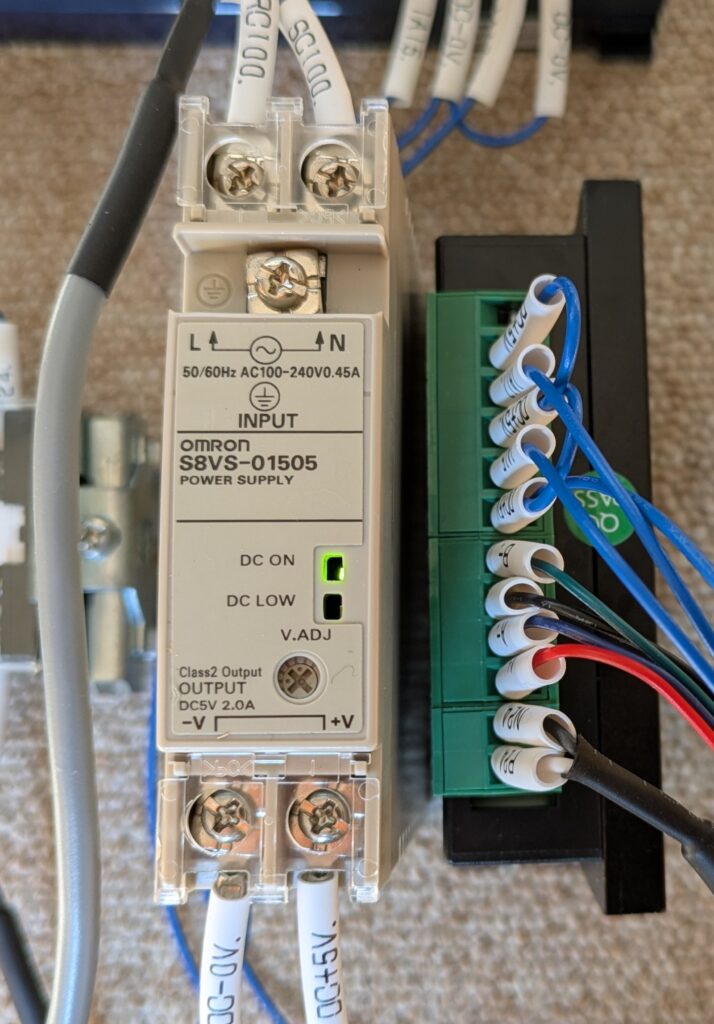
ドライバー Micostep Driver
モーター US-17HS4401S
※(ドライバー、モーターメーカー不明)
DOCUMENT
今回は、Micostep Driverの制御出力
DC5V電源が必要です。
DC24V制御の場合
抵抗を入力信号に割り込ませても良いのですが・・・
参考に
抵抗 2K2Ω×3本※各信号に1本必要
DC24VからDC5Vに変圧します。
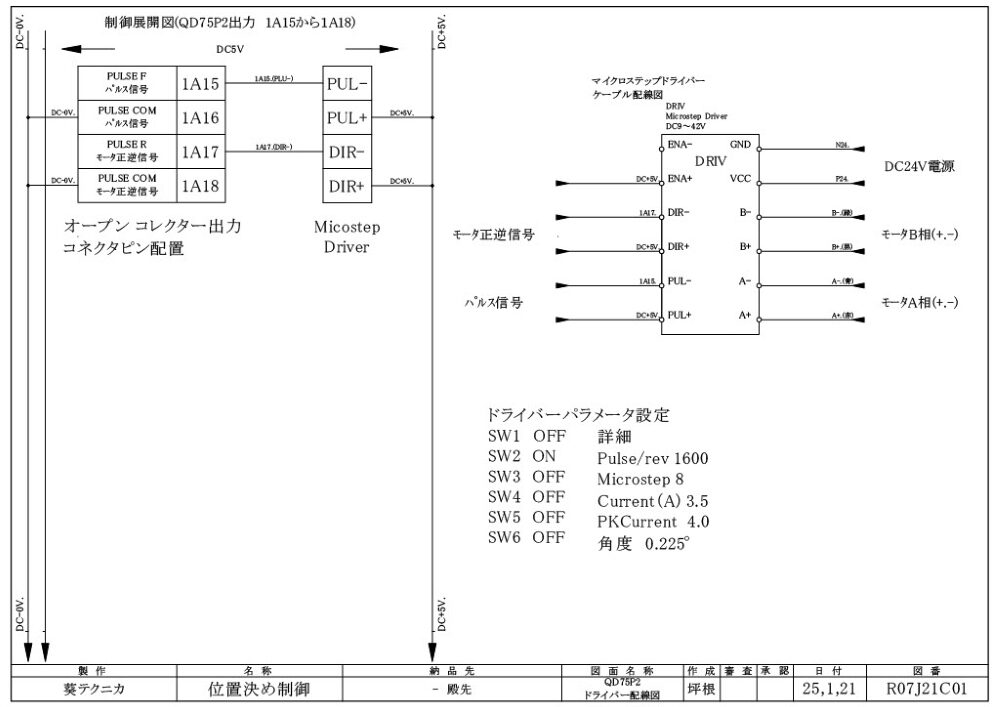
SETTING 1 MICOSTEP DRIVER
構成
単純に1対1
設定
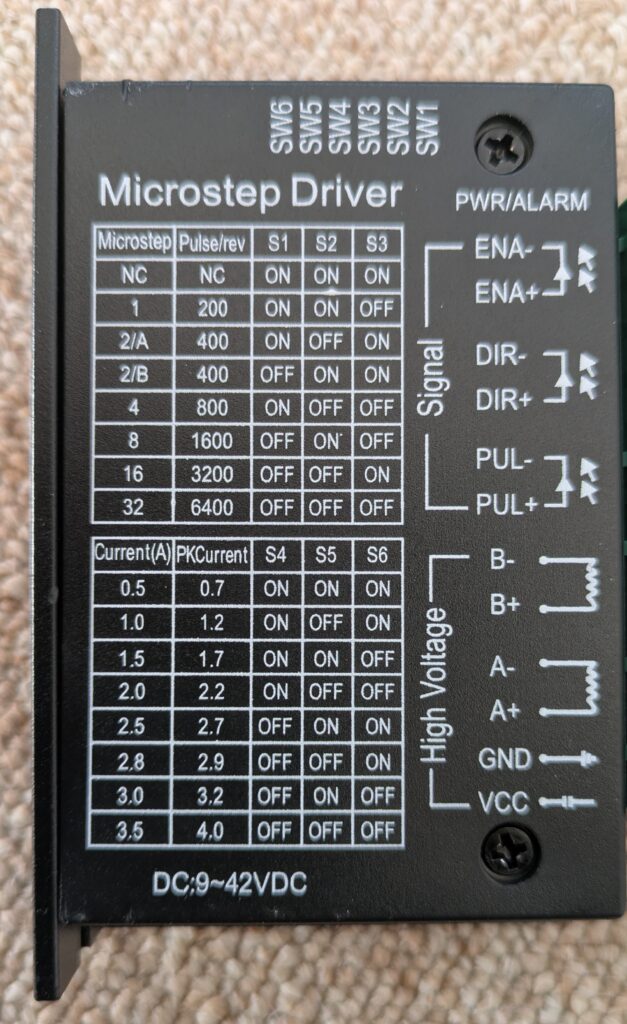
Micostep Driver
パラメータ設定
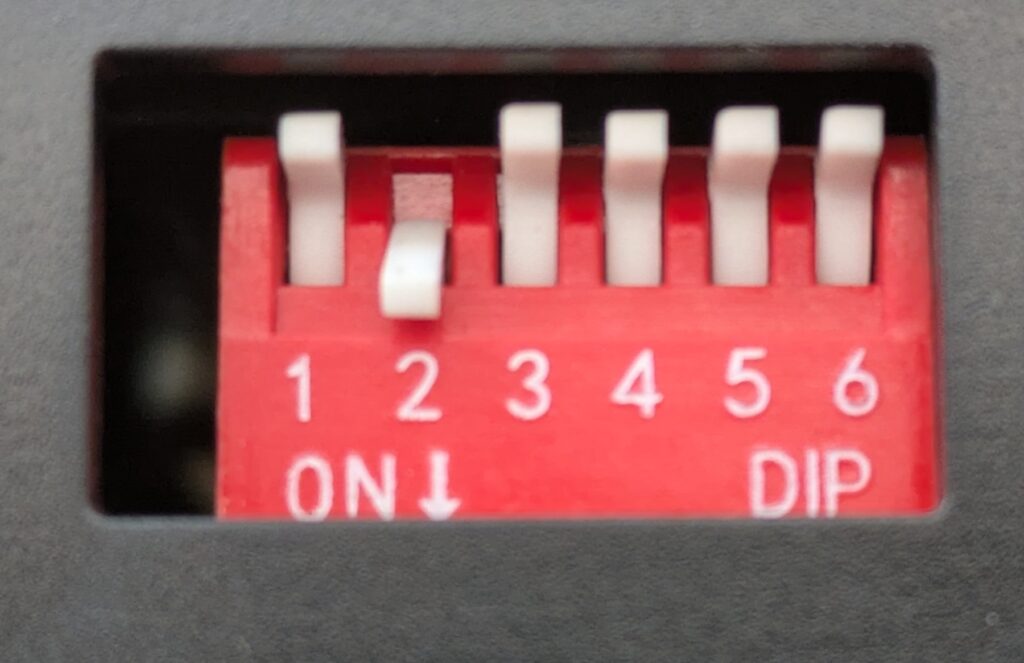
SW1 OFF
SW2 ON
SW3 OFF
SW4 OFF
SW5 OFF
SW6 OFF
パルス 1600
角度 0.225°
詳細
今回は、Micostep Driver
パラメータ設定は初期設定で運転しました。
パルス 1600
基本ステップ角
0.225°=360°÷1600ステップ
角度 0.225°
回転速度
3.75(r/min)=
(0.225°÷360°)×100Hz(パルス速度)×60s(60秒)
3.75(r/min)=1分間に約4回転
例
1000Hzでは 1分間に37.5回転 約38回転
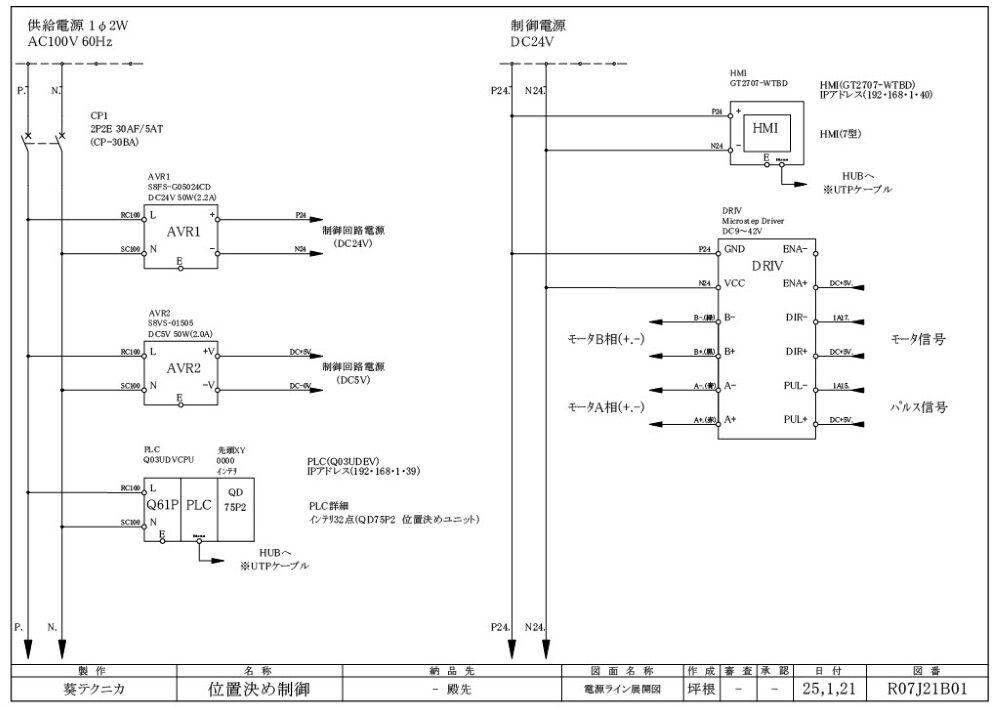
接続説明ENA イネーブル機能
PUL パルス信号
DIR モータ正逆信号
B B相(モータ)
A A相(モータ)
GND/VCC DC電源9~42V
詳細はDOCUMENT項目
制御展開図配線図に記載しています。
SETTING 1 QD75P2
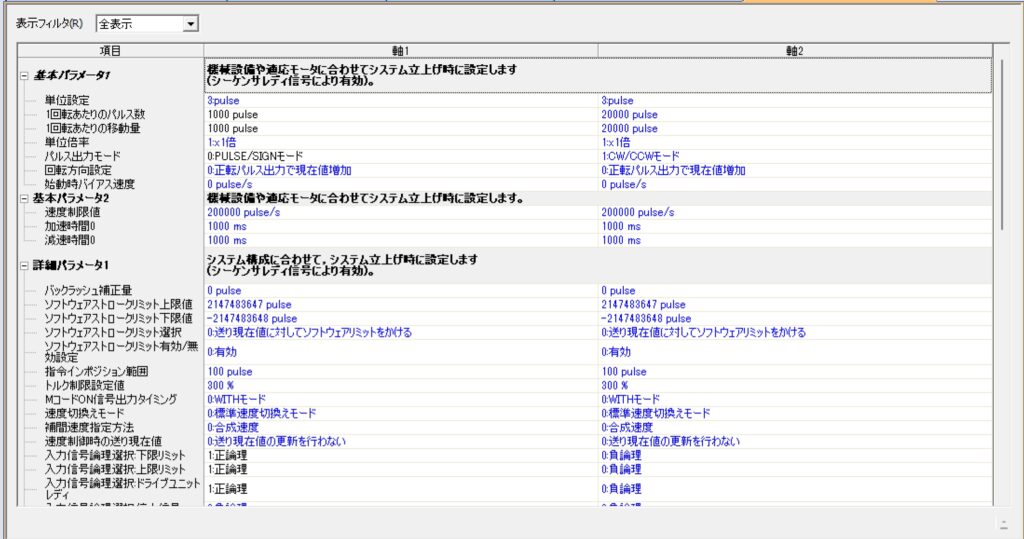
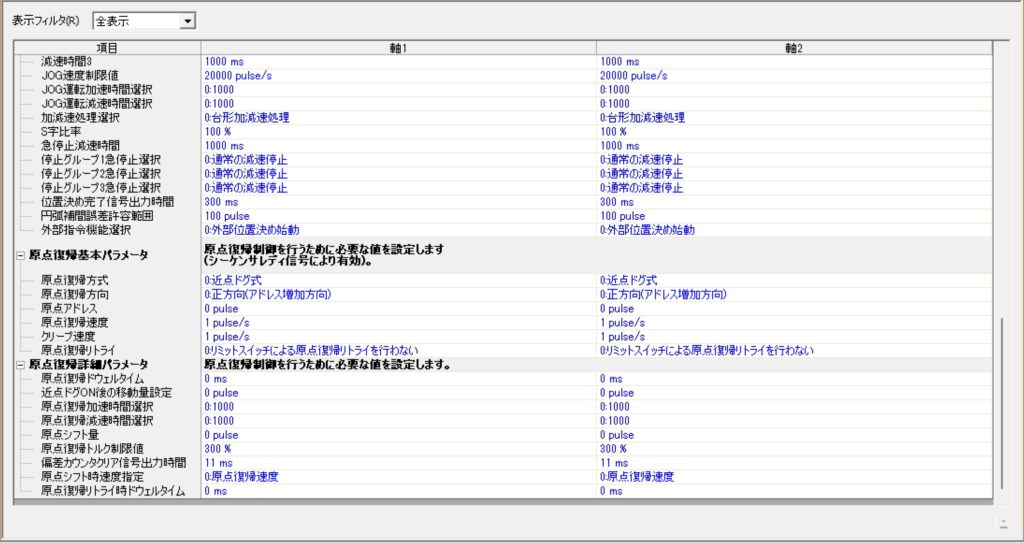
パラメータ設定
特に略、設定は初期設定で・・・
今回、変更した所は・・・
1回あたりのパルス数 1000pulse
1回あたりの移動量 1000pulse
パルス出力モード 0:PULSE/SIGNモード
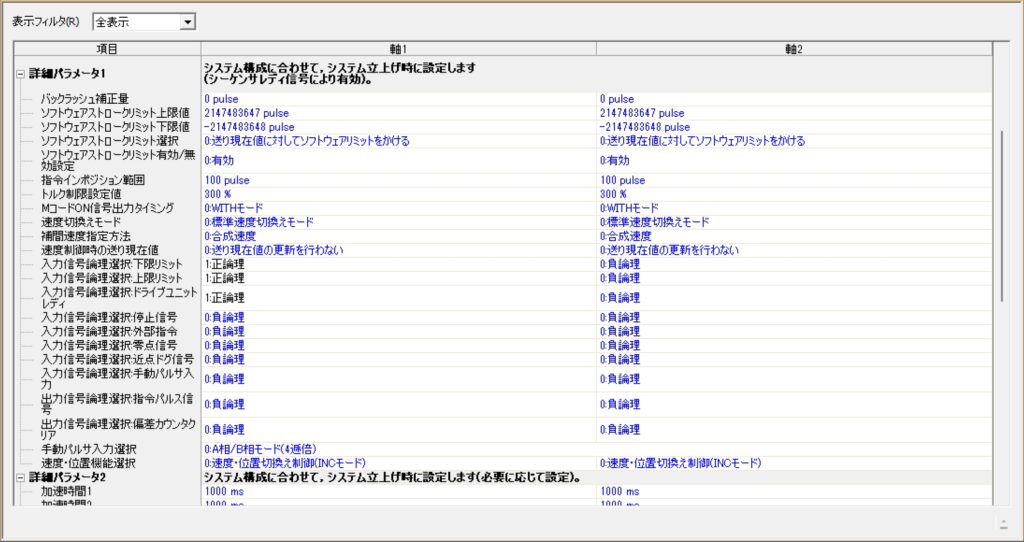
詳細パラメータ1
入力信号論理選択:下限リミット 1:正論理
入力信号論理選択:上限リミット 1:正論理
入力信号論理選択:
ドライブユニットレディ 1:正論理
※用途によって、パラメータ設定変更を・・・
今回は、初歩的な物だけを選択設定・・・
その他は基本設定で様子をみながら
個々を設定していきます。
SETTING 2 QD75P2
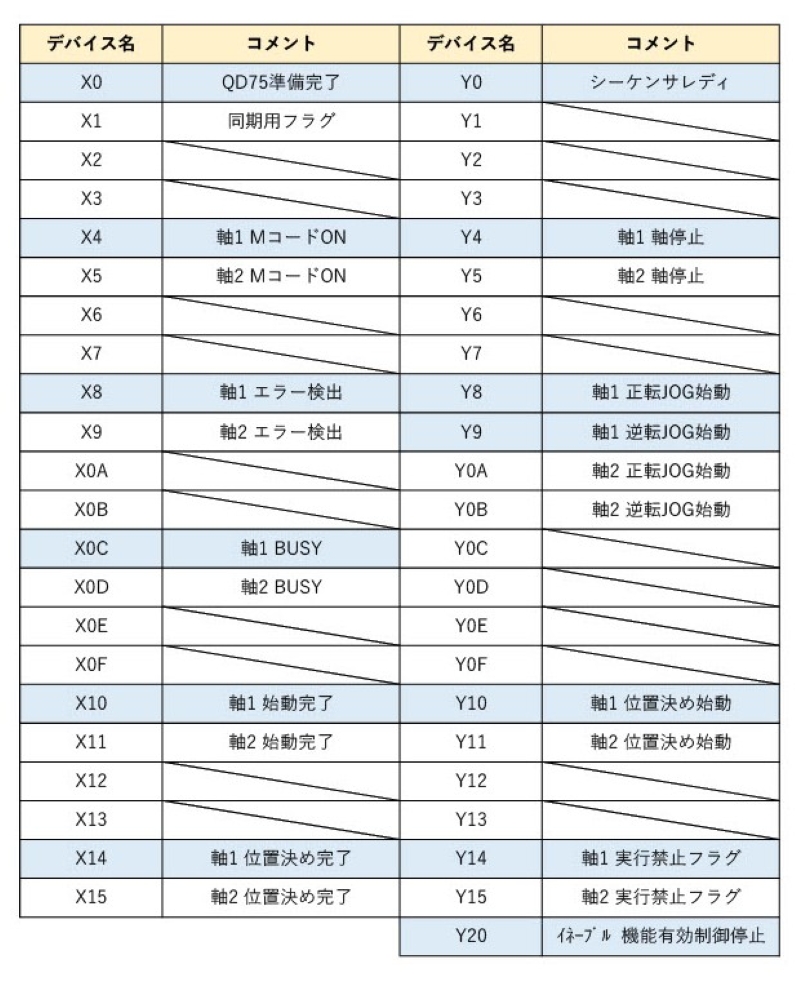
使用デバイス
入力
X0 QD75準備完了
※Y0 シーケンサレディON時
X0がON
X0C 1軸BUSY
※工程終了判断で使用
出力
Y0 QD75準備完了
Y4 軸1 軸停止
※一時停止指令で使用
Y8 1軸正転JOG始動
※JOG運転で使用
Y9 1軸逆転JOG始動
※JOG運転で使用
Y10 位置決め開始信号
今回補足
補足 Y4を追加しました。

今回使用した
バッファメモリー
U0¥G012 加速時間
U0¥G014 減速時間
U0¥G800 送り現在値
U0¥G804 送り速度
U0¥G806 軸エラー番号
U0¥G1500 位置決め始動番号
U0¥G1502 軸エラーリセット
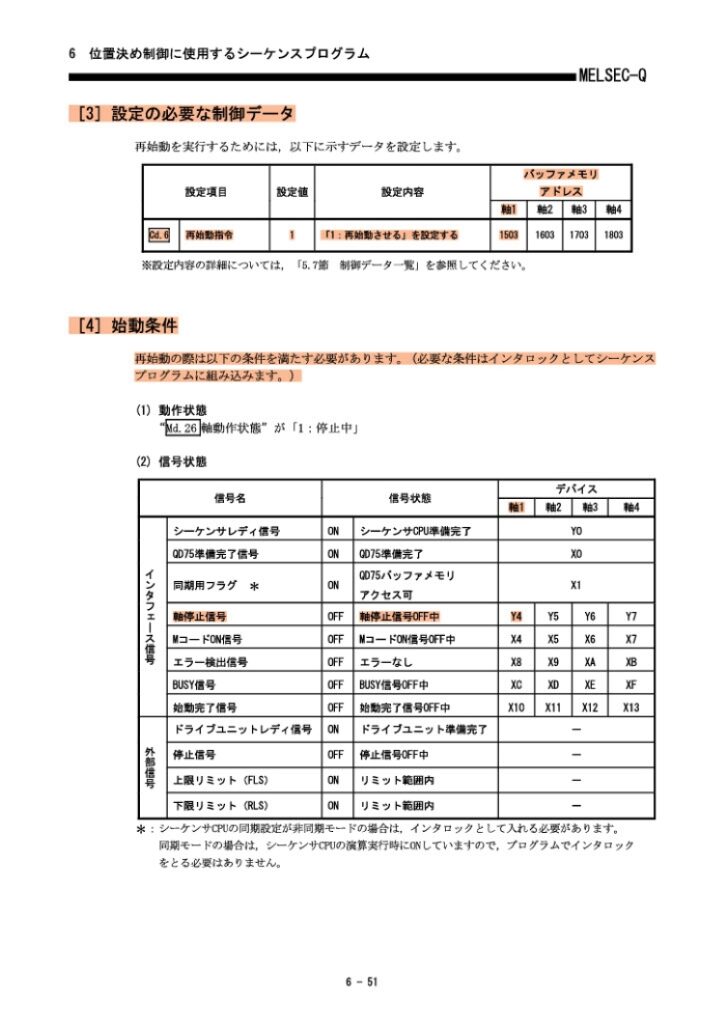
U0¥G1503 再起動させる
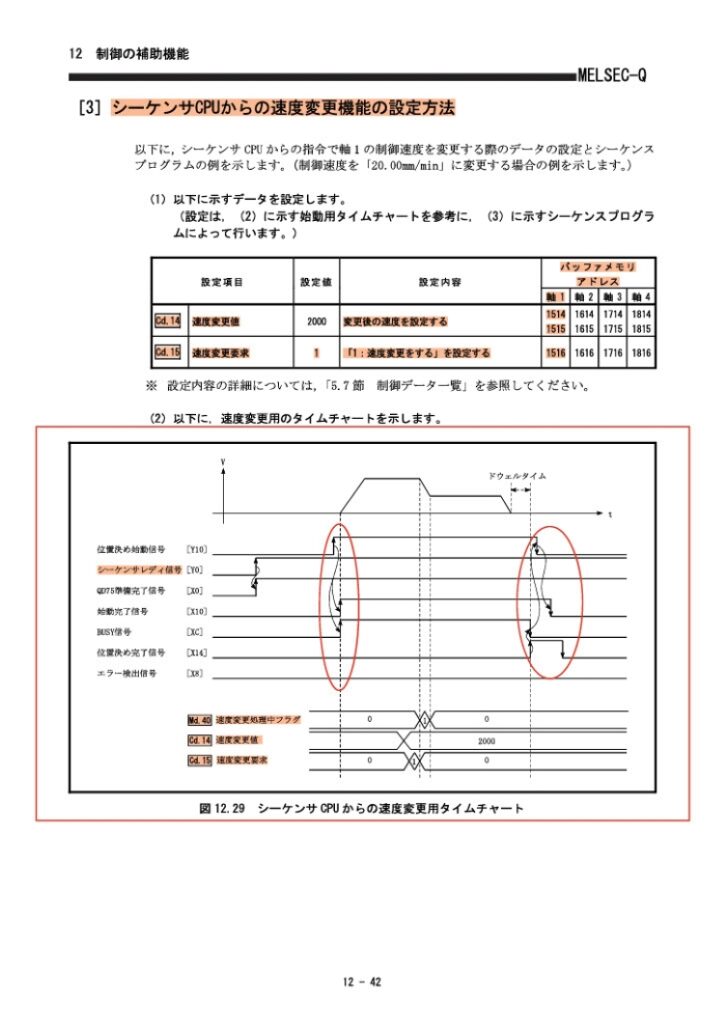
U0¥G1514 変更後の速度設定
U0¥G1516 速度変更をする
U0¥G1518 JOG速度
U0¥G1520 速度運転中断要求
U0¥G2004 指定速度
U0¥G2006 位置決めアドレス/移動量
U0¥G2000 No.1位置決め識別子
今回補足・・・
U0¥G1503/1514/1516/1520を
追加しました。
WRITING INSTRUCTION1
WRITING INSTRUCTION2
参照
QD75P/QD75D形位置決めユニット
ユーザーズマニュアル(詳細編)
REFERNCE DRIVING PATTERN
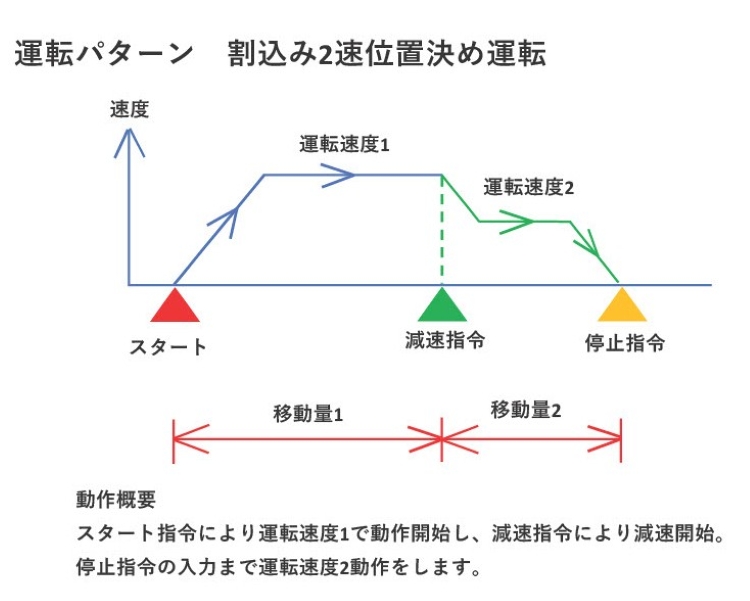
割込み2速位置決め運転
2速位置決めの位置決め結果、
1速位置決めと同じですが・・・
目標に到達するまでに運転速度を・・・
2段階に変更する事ができます。
FOR REFERENCE LADDER
パラメータを設定して
バッファメモリーを選択してプログラムに
反映させてプログラムを走らせます。
今回は、JOG運転・1速位置決め運転で・・・
追加制御 一時停止・速度変更
Micostep Driverを制御します。
参照
QD75P/QD75D形位置決めユニット
ユーザーズマニュアル(詳細編)
DEMONSTRATION
動作確認
1.ジョグ運転動作
2.原点復帰動作
※0地点を原点位置にしています。
3.エラーコード表示
4.一時停止/復旧
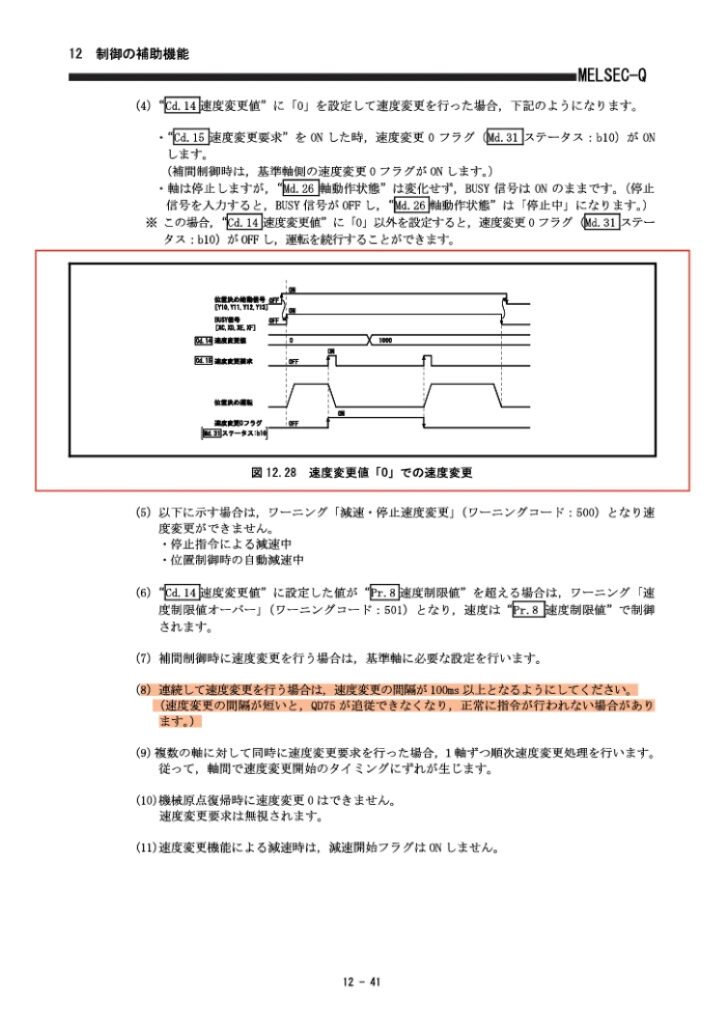
5.速度変更
6.1速位置決め運転
6項目を動作確認します。
SUMMARY
補足追加・・・
位置決め制御を取上げました。
基本動作に・・・
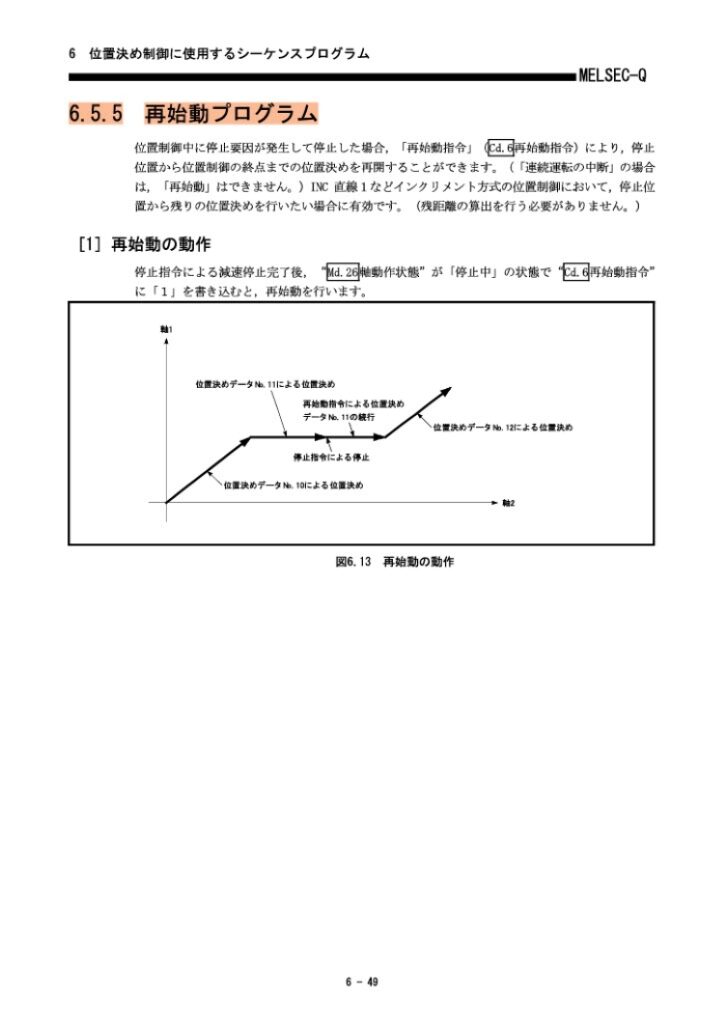
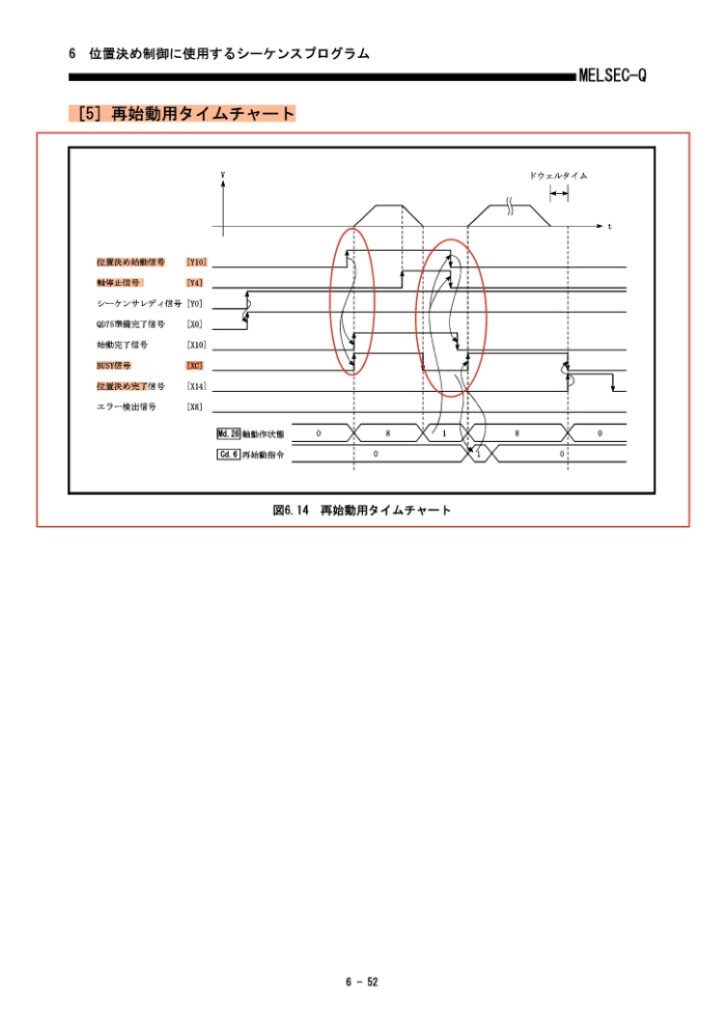
一時停止/復帰動作
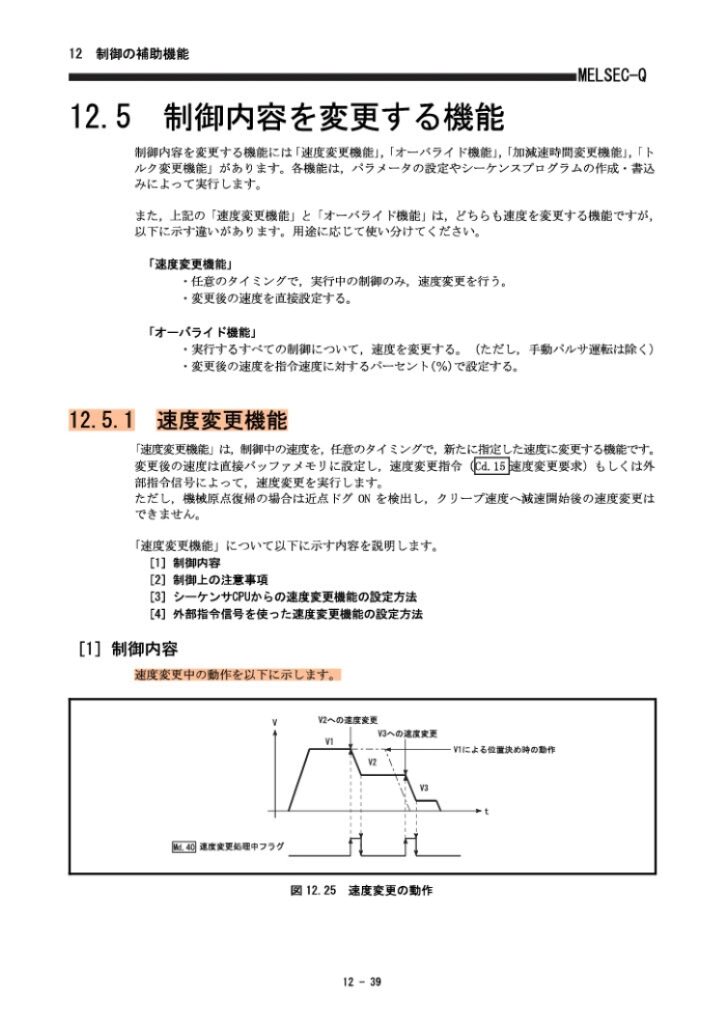
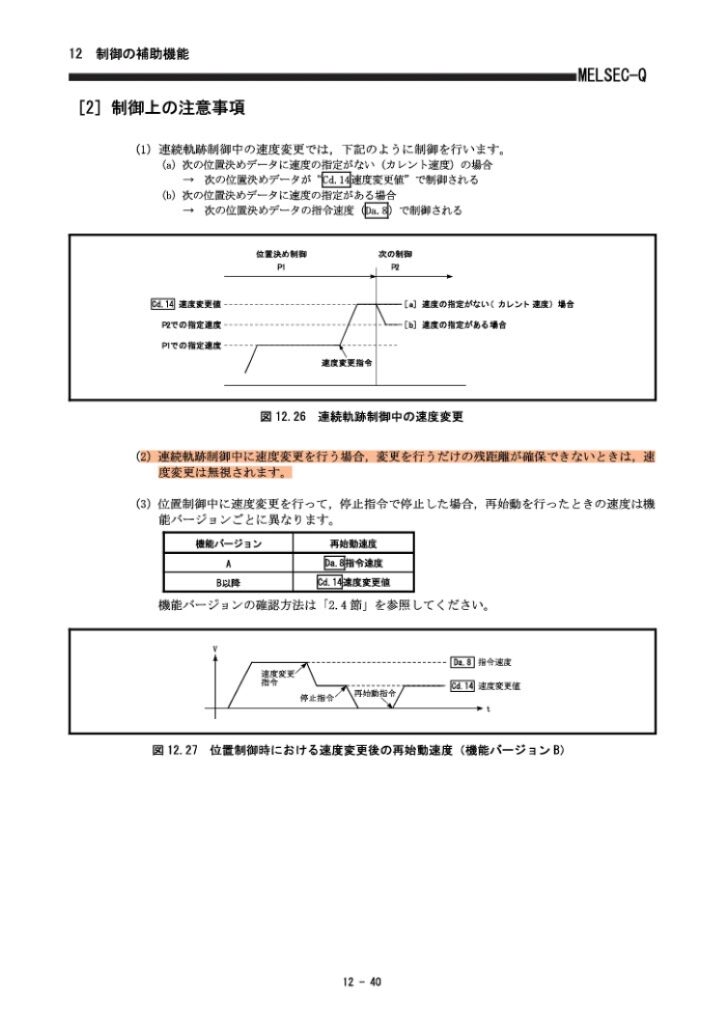
速度変更
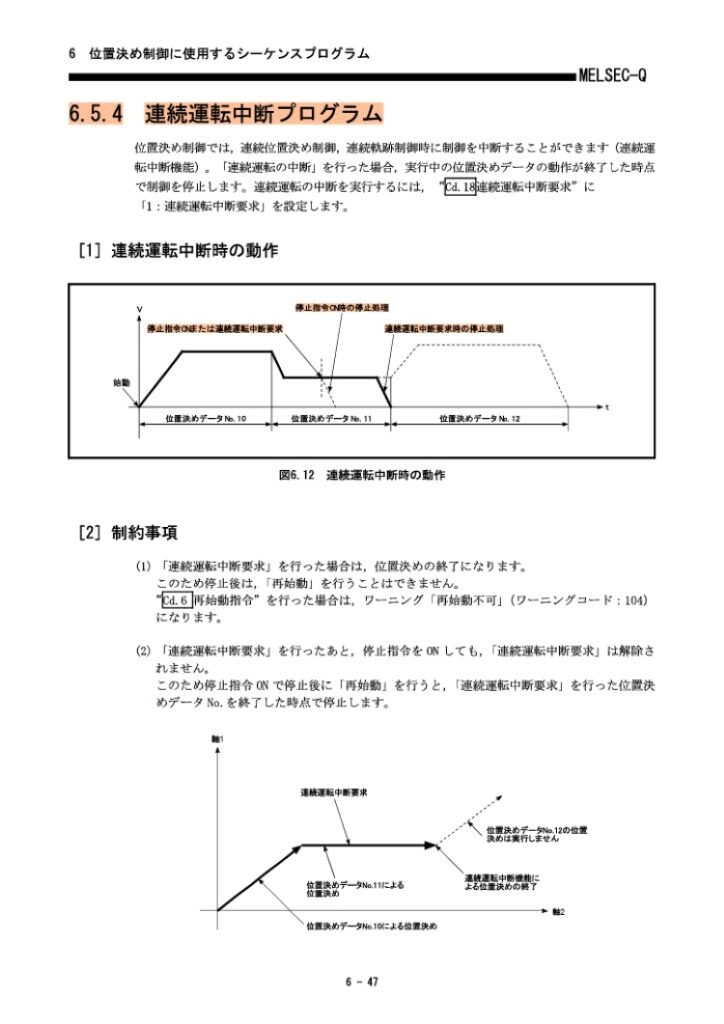
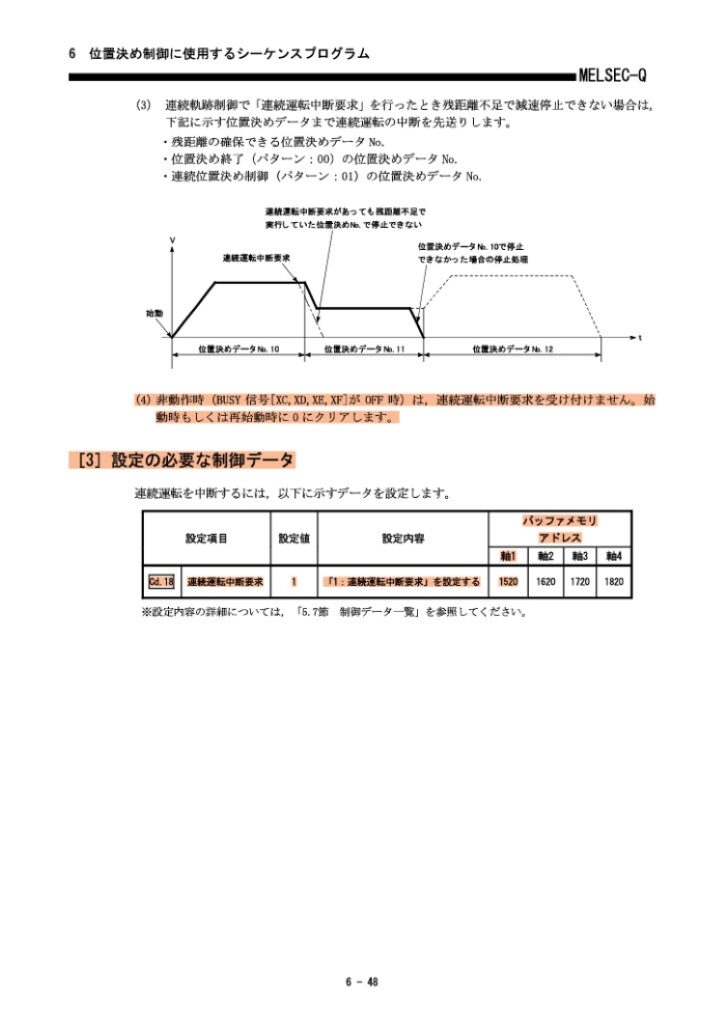
連続運転制御を加えました・・・
基礎制御です。
基礎制御が理解出来ていないと・・・
応用ができないと考えてます・・・
位置決め制御は
数ミリ・・・
それ以上精度が要求されます・・・
時間・・・
製品精度・・・
後・・・
途中で制御が止まらない・・・
(プログラム異常等で・・・)
生産中に迷惑を掛けない!!
本当に・・・
難しい制御と思います・・・
備忘録として
日々、勉強していきます。
雑な説明でしたが・・・
最後までお読みいただきありがとうございました。

