
位置決め制御 QD75P2⇔1軸ステッピングモータ
PREFACE
位置決め制御
今回は・・・
PLCからステッピングモーターを
位置制御の基本動作を
検証していきます。
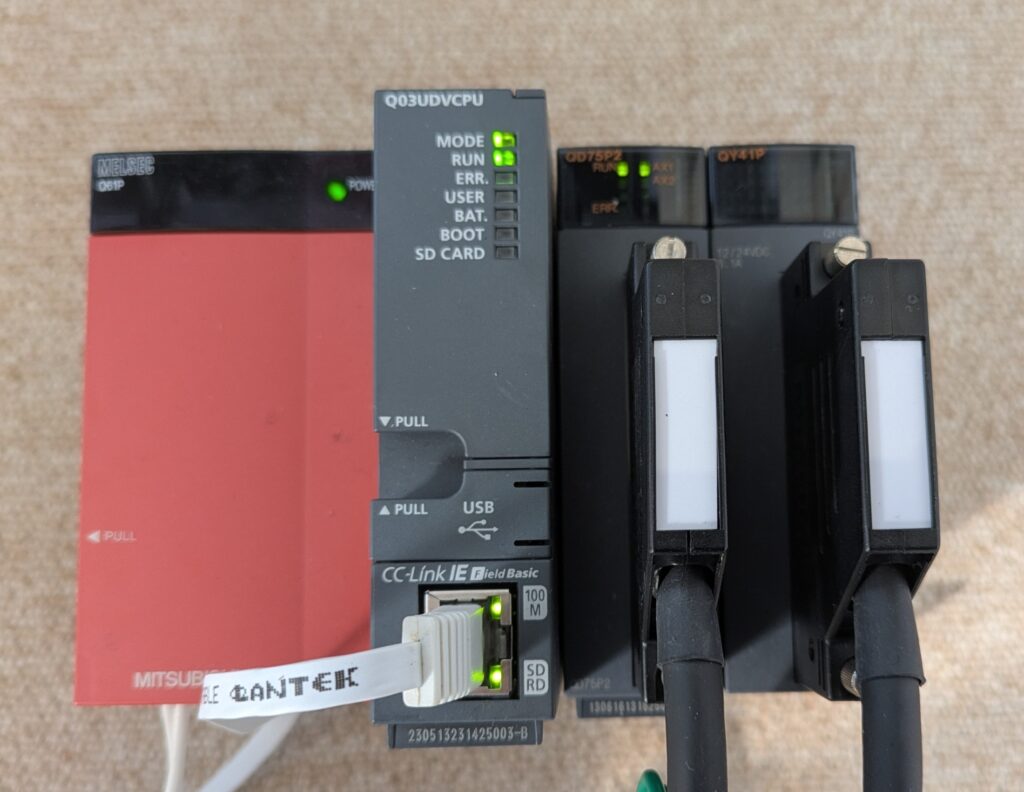
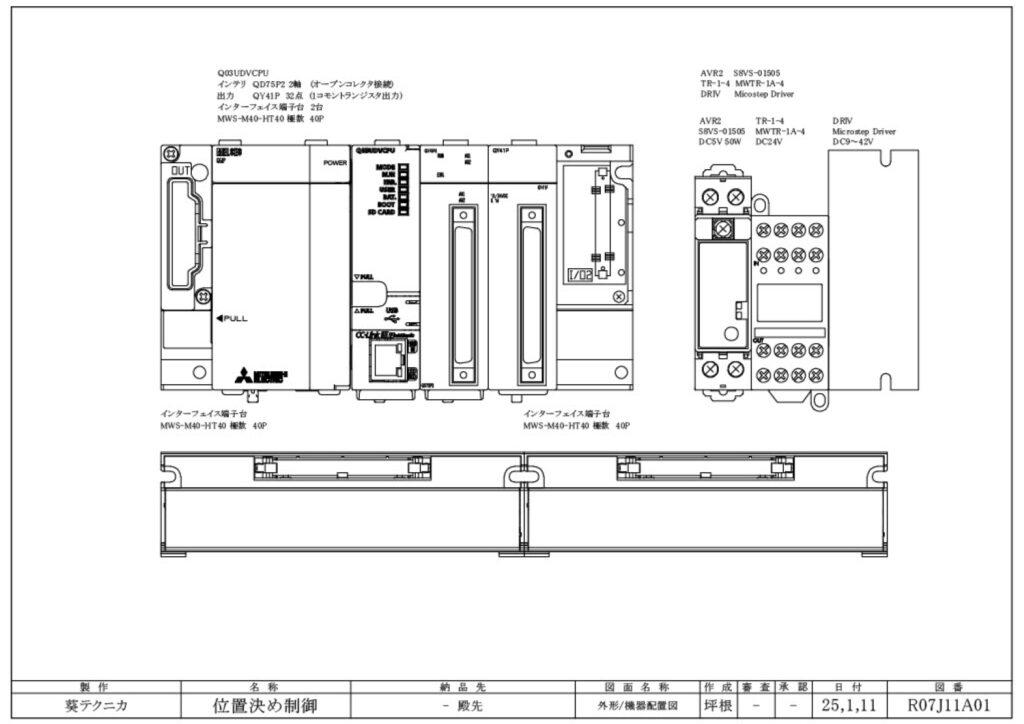
構成
CPU Q03UDVCPU(三菱電機製)
インテリ QD75P2
出力 QY41P
※QD75P2 発売状況 生産終了
生産終了日 2021年09月
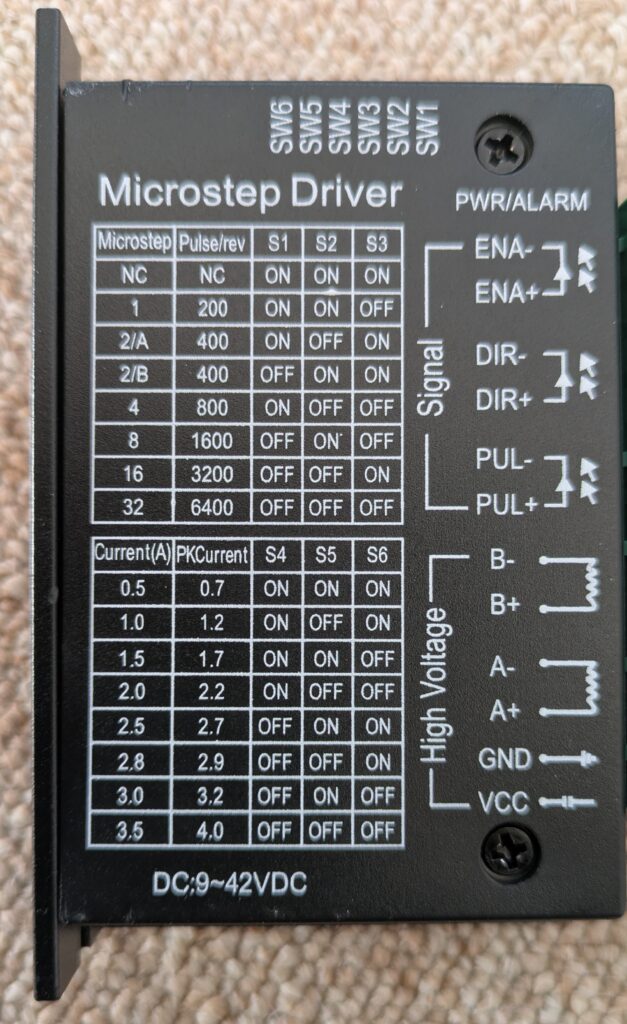
ドライバー Micostep Driver
モーター US-17HS4401S
※(ドライバー、モーターメーカー不明)
DOCUMENT
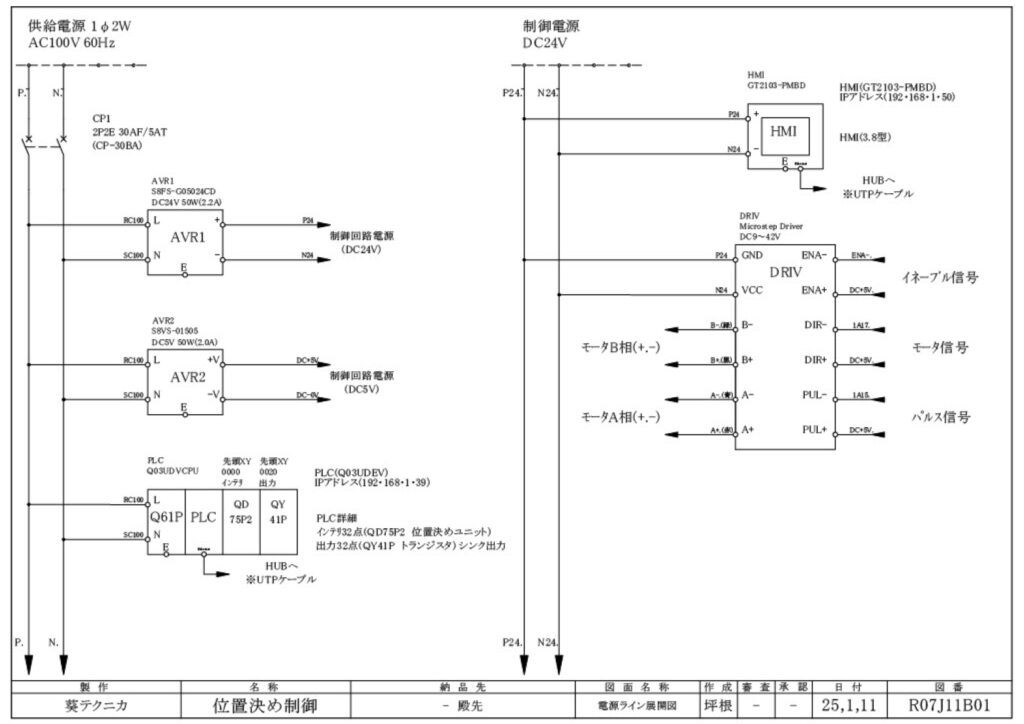
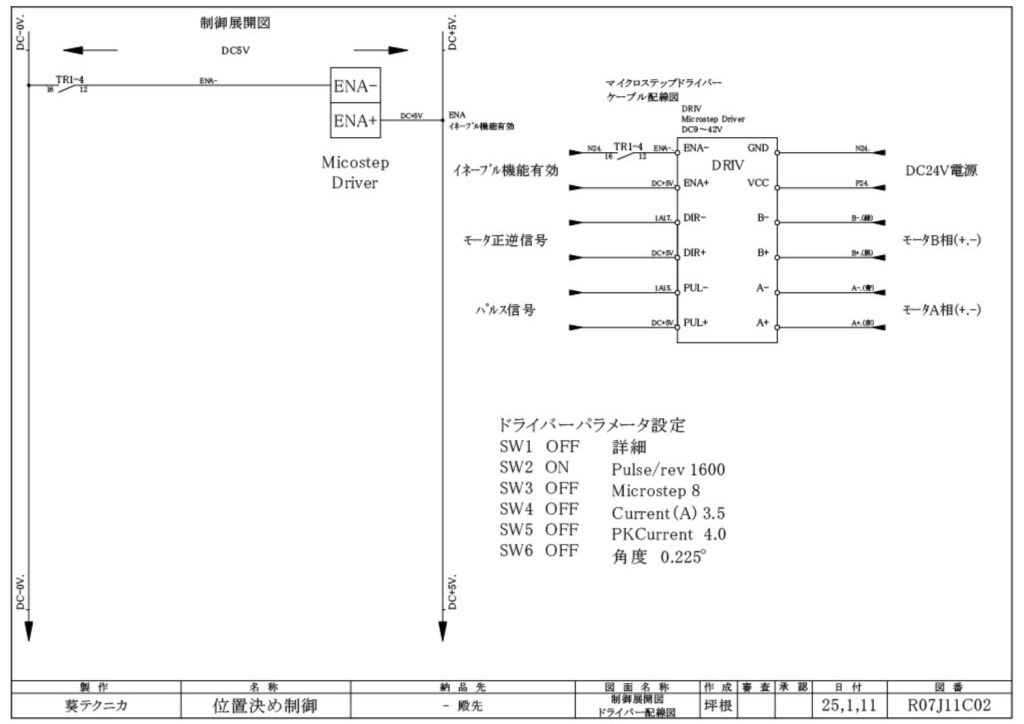
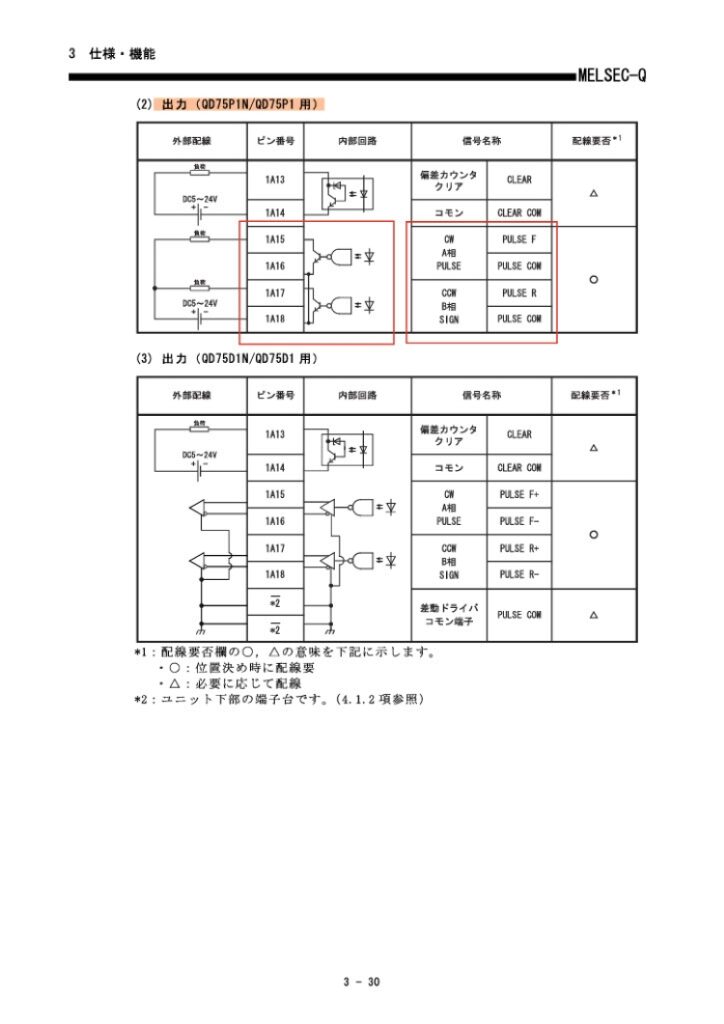
今回は、Micostep Driverの制御出力
DC5V電源が必要です。
DC24V制御の場合
抵抗を入力信号に割り込ませても良いのですが・・・
※QY41Pの定格負荷電圧 DC12-24V(+20/-15%)
QY41Pの定格負荷電圧の最低電圧がDC12Vなので・・・
イネーブル機能を使用時DC5V電源がいるので、リレー接点を受けて
Micostep Driverに接続・・・
参考に
抵抗 2K2Ω×3本※各信号に1本必要
DC24VからDC5Vに変圧します。
SETTING 1 MICOSTEP DRIVER
構成
単純に1対1
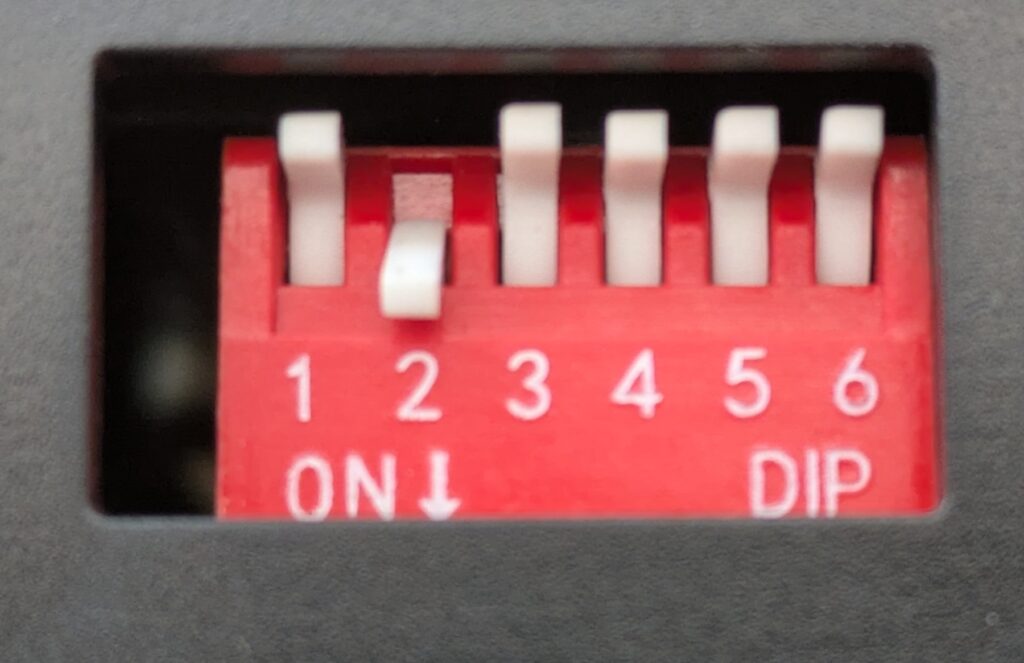
設定
Micostep Driver
パラメータ設定
SW1 OFF
SW2 ON
SW3 OFF
SW4 OFF
SW5 OFF
SW6 OFF
パルス 1600
角度 0.225°
詳細
今回は、Micostep Driver
パラメータ設定は初期設定で運転しました。
パルス 1600
基本ステップ角
0.225°=360°÷1600ステップ
角度 0.225°
回転速度
3.75(r/min)=
(0.225°÷360°)×100Hz(パルス速度)×60s(60秒)
3.75(r/min)=1分間に約4回転
例
1000Hzでは 1分間に37.5回転 約38回転
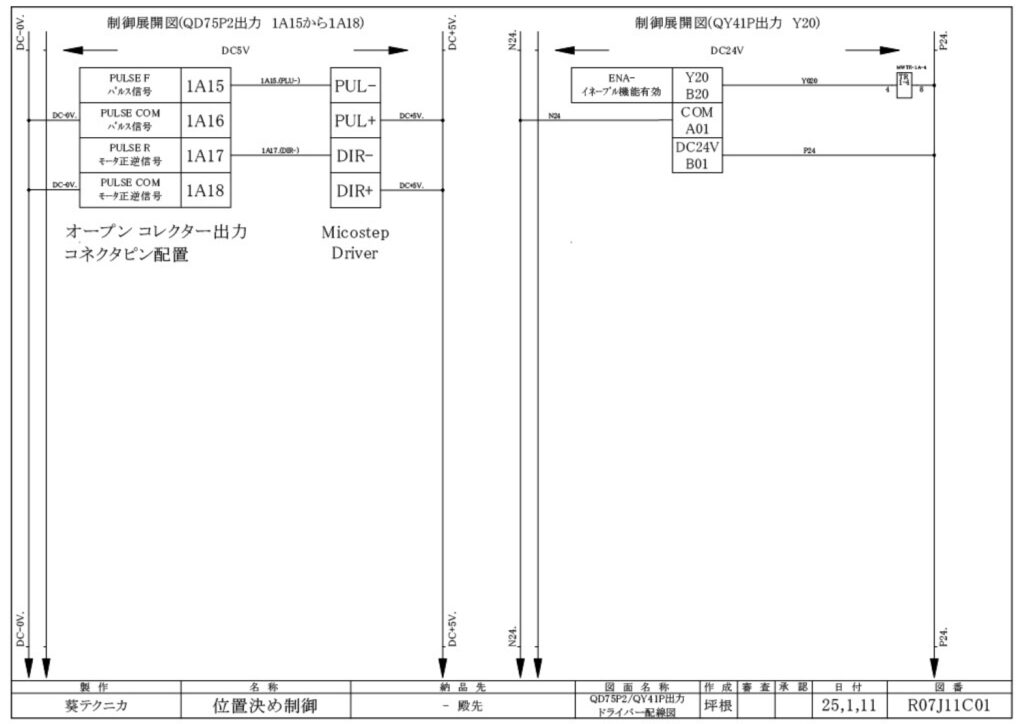
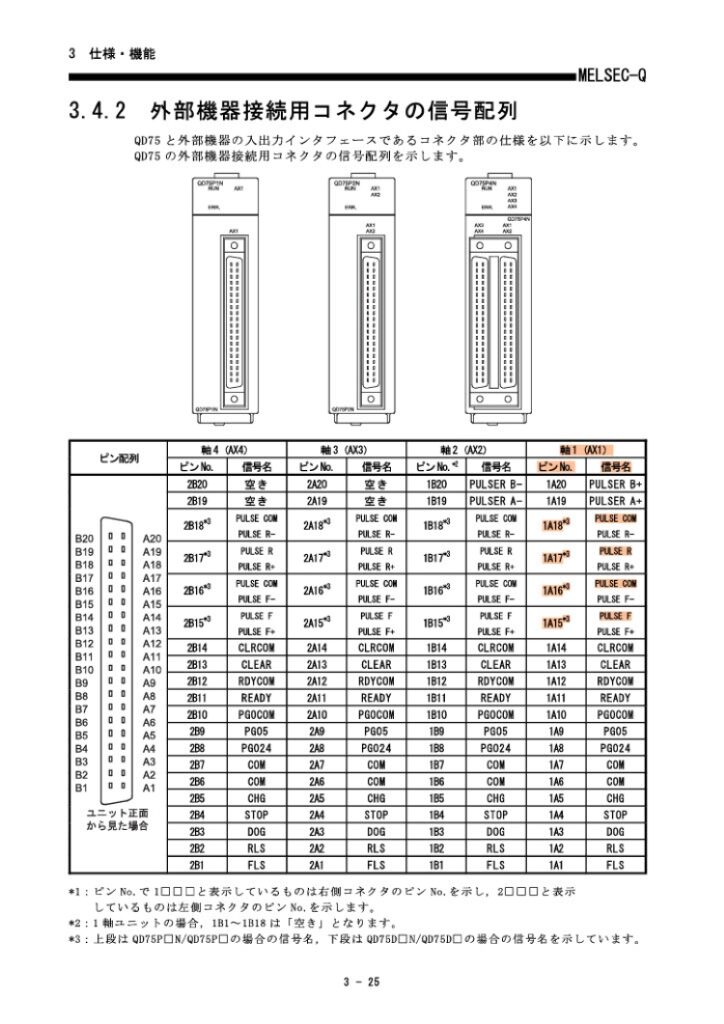
接続説明
ENA イネーブル機能
PUL パルス信号
DIR モータ正逆信号
B B相(モータ)
A A相(モータ)
GND/VCC DC電源9~42V
詳細はDOCUMENT項目
制御展開図配線図に記載しています。
SETTING 1 QD75P2
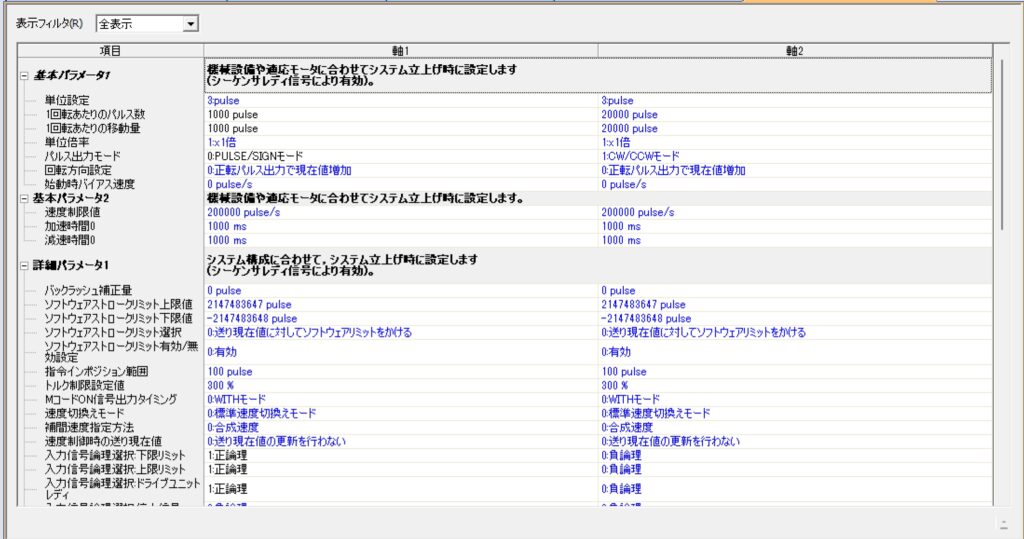
パラメータ設定
特に略、設定は初期設定で・・・
今回、変更した所は・・・
1回あたりのパルス数 1000pulse
1回あたりの移動量 1000pulse
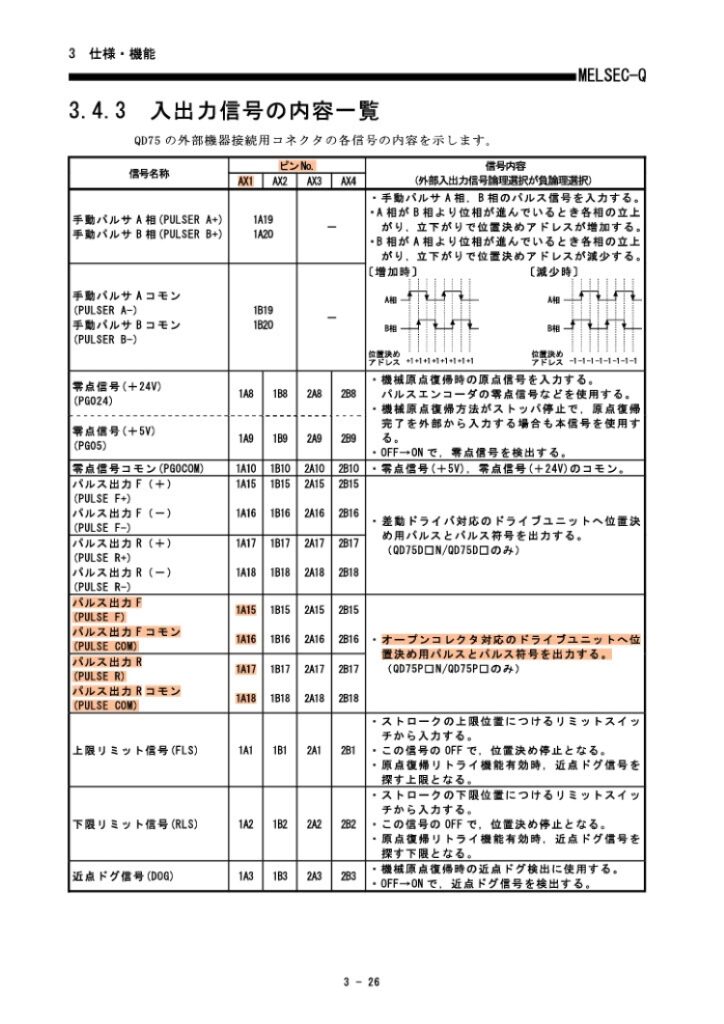
パルス出力モード 0:PULSE/SIGNモード
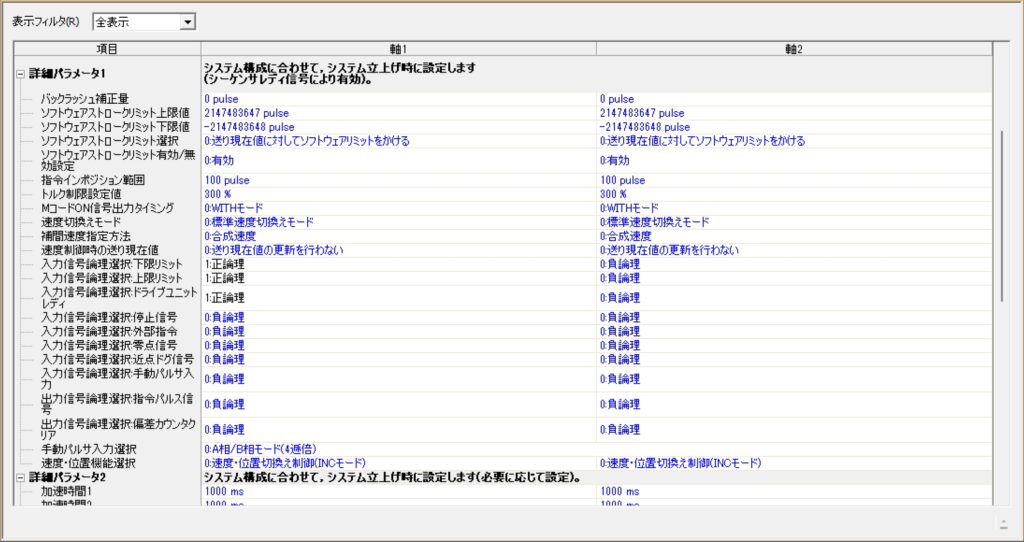
詳細パラメータ1
入力信号論理選択:下限リミット 1:正論理
入力信号論理選択:上限リミット 1:正論理
入力信号論理選択:
ドライブユニットレディ 1:正論理
※用途によって、パラメータ設定変更を・・・
今回は、初歩的な物だけを選択設定・・・
その他は基本設定で様子をみながら
個々を設定していきます。
SETTING 2 QD75P2
使用デバイス
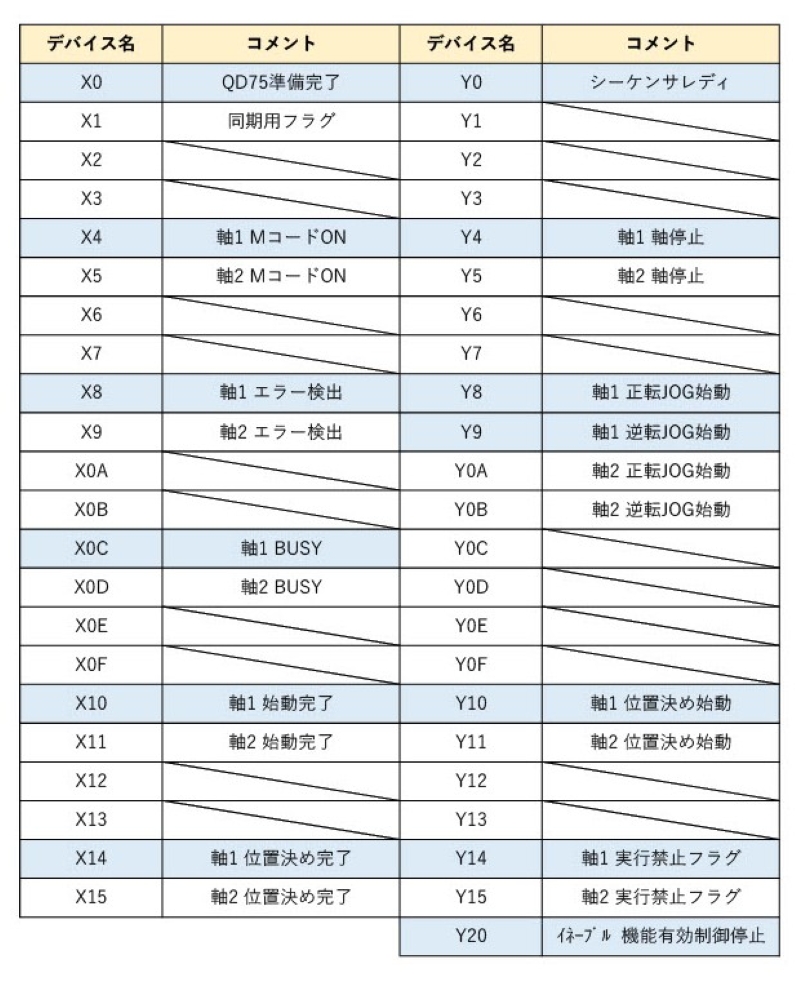
入力
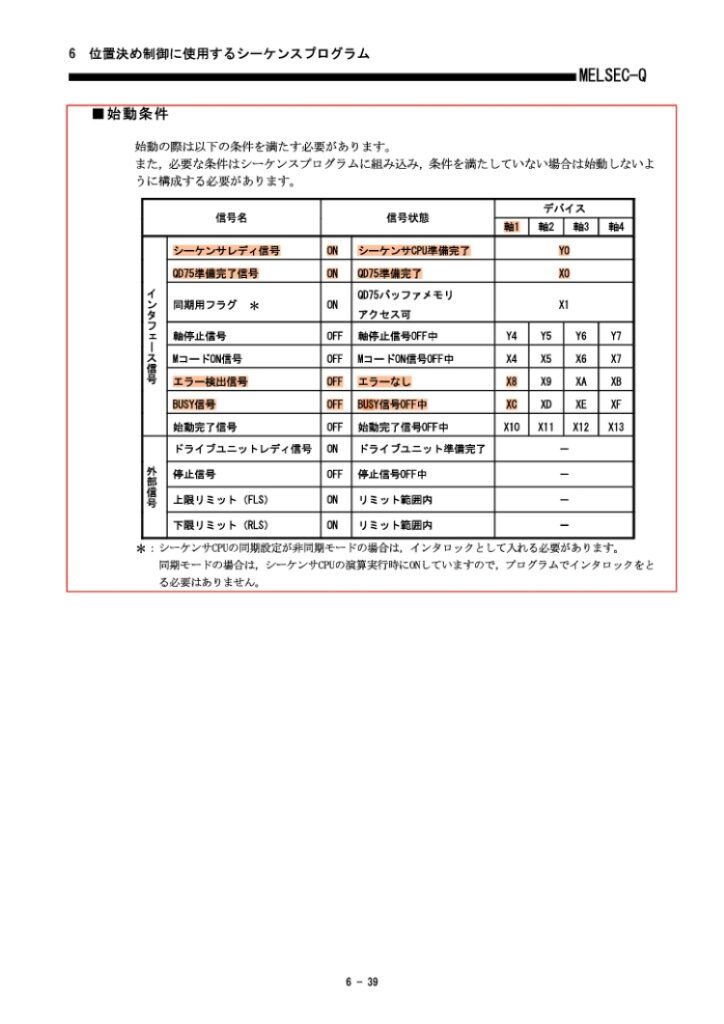
X0 QD75準備完了
※Y0 シーケンサレディON時
X0がON
X0C 1軸BUSY
※工程終了判断で使用
出力
Y0 QD75準備完了
Y8 1軸正転JOG始動
※JOG運転で使用
Y9 1軸逆転JOG始動
※JOG運転で使用
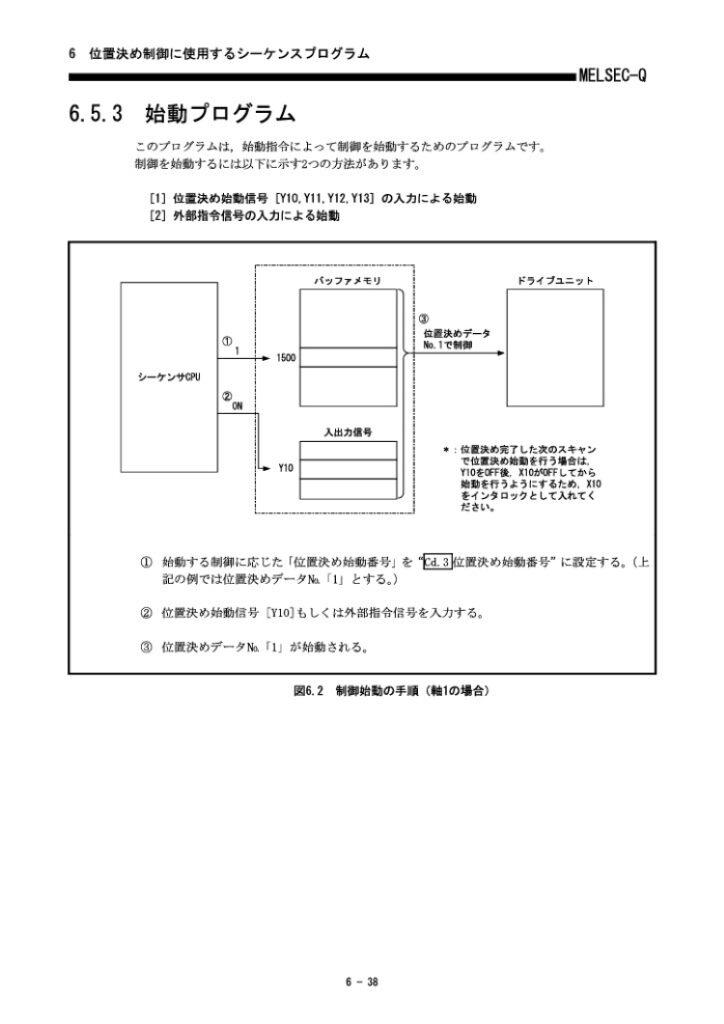
Y10 位置決め開始信号

今回使用した
バッファメモリー
U0¥G012 加速時間
U0¥G014 減速時間
U0¥G800 送り現在値
U0¥G804 送り速度
U0¥G806 軸エラー番号
U0¥G1500 位置決め始動番号
U0¥G1502 軸エラーリセット
U0¥G1518 JOG速度
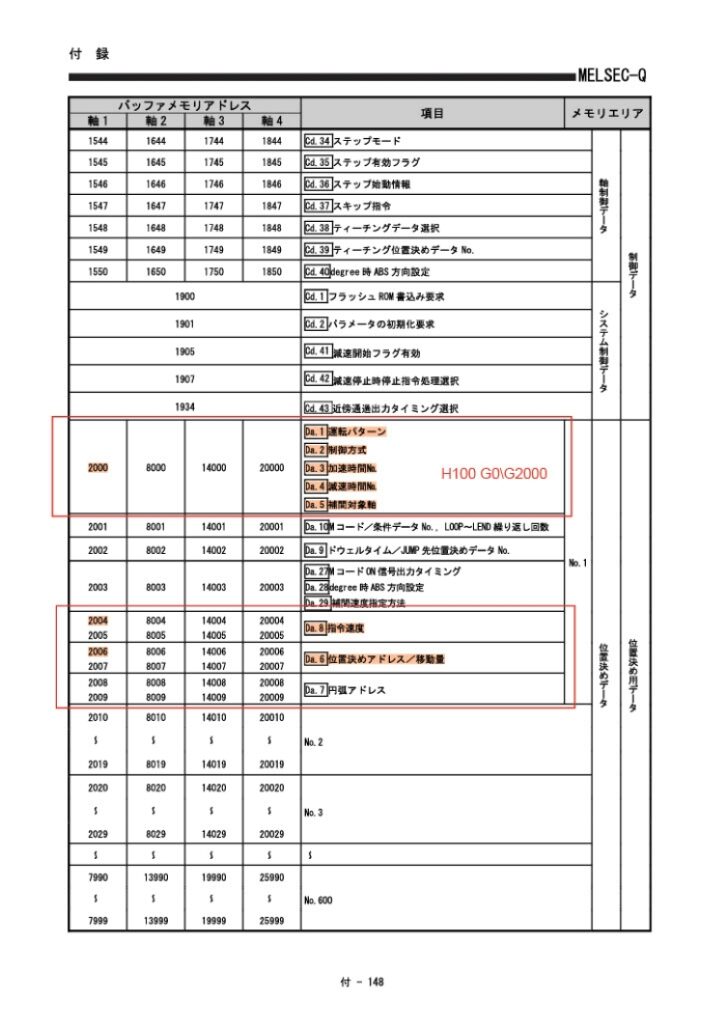
U0¥G2004 指定速度
U0¥G2006 位置決めアドレス/移動量
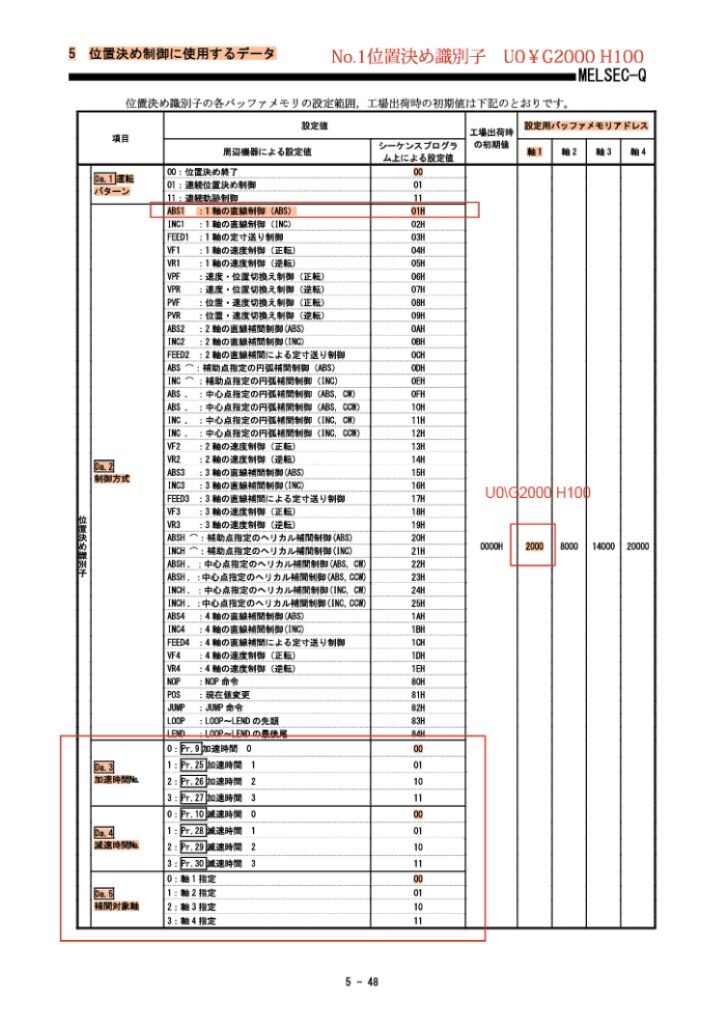
U0¥G2000 No.1位置決め識別子
最低限これだけ設定すれば・・・
動作します。
WRITING INSTRUCTION1
WRITING INSTRUCTION2
WRITING INSTRUCTION3
参照
QD75P/QD75D形位置決めユニット
ユーザーズマニュアル(詳細編)
REFERNCE DRIVING PATTERN
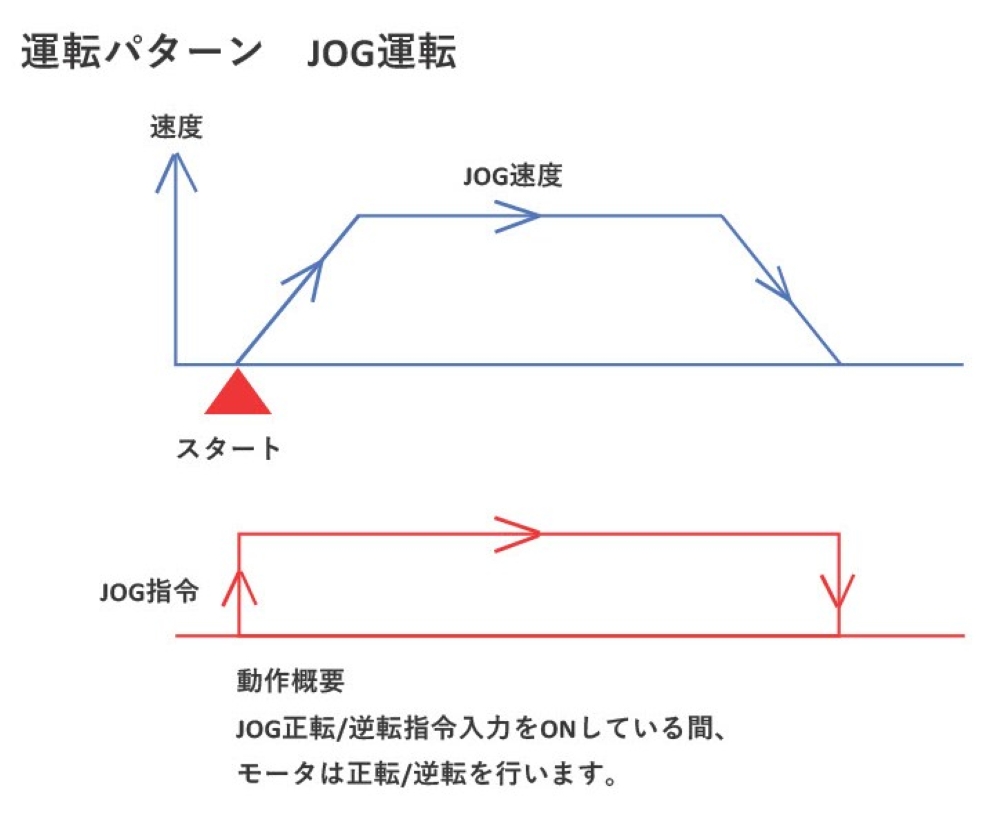
JOG運転
JOG(ジョグ)運転は・・・
位置決めするワークを手動で
任意の位置に移動させる
時の運転モード・・・
JOG運転は正転方向の
操作として JOG+
逆転方向の操作として
JOG-
など・・・
表現があります・・・
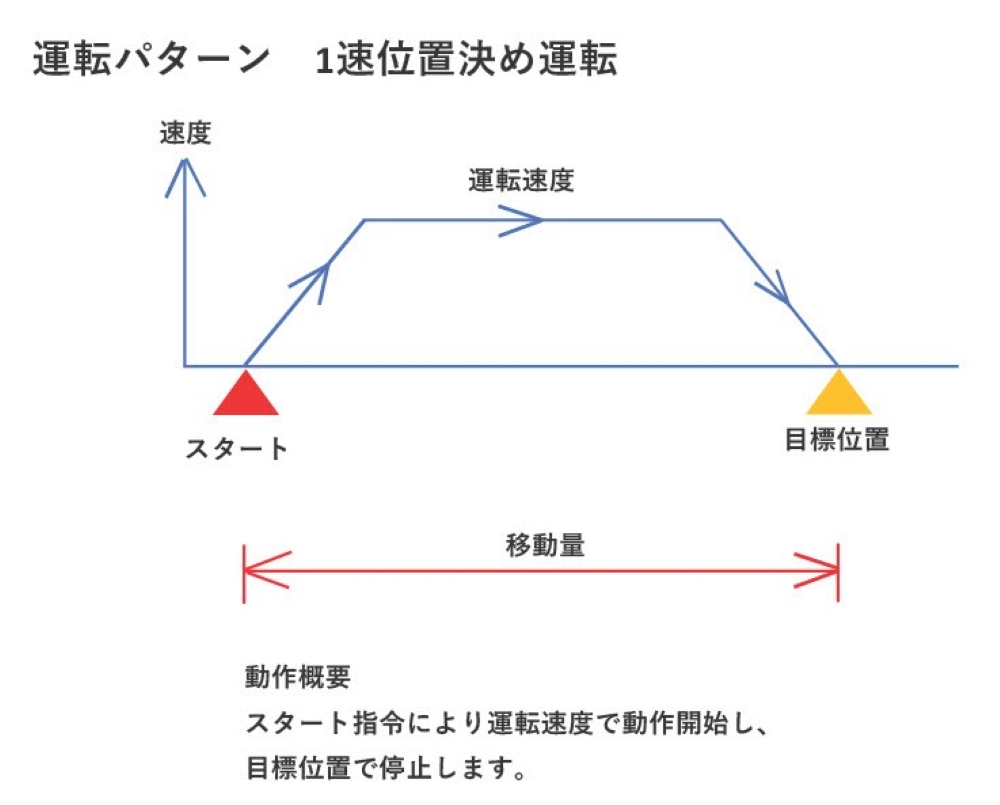
1速位置決め運転
位置決めで最も使われる
基本的な運転モード・・・
現在(スタート)位置から
目標位置までの間を
指定した速度で移動します・・・
スタート時とストップ時には・・・
段階的な加速と減速を
行うことができ・・・
この指定を加速時間/減速時間
と呼びます・・・
運転の軌跡が台形状に見える事から・・・
台形運転などと呼ばれます・・・
FOR REFERENCE LADDER
パラメータを設定して
バッファメモリーを選択してプログラムに
反映させてプログラムを走らせます。
今回は、JOG運転・1速位置決め運転で・・・
Micostep Driverを制御します。
参照
QD75P/QD75D形位置決めユニット
ユーザーズマニュアル(詳細編)
DEMONSTRATION
動作確認
1.ジョグ運転動作
2.1速位置決め運転動作
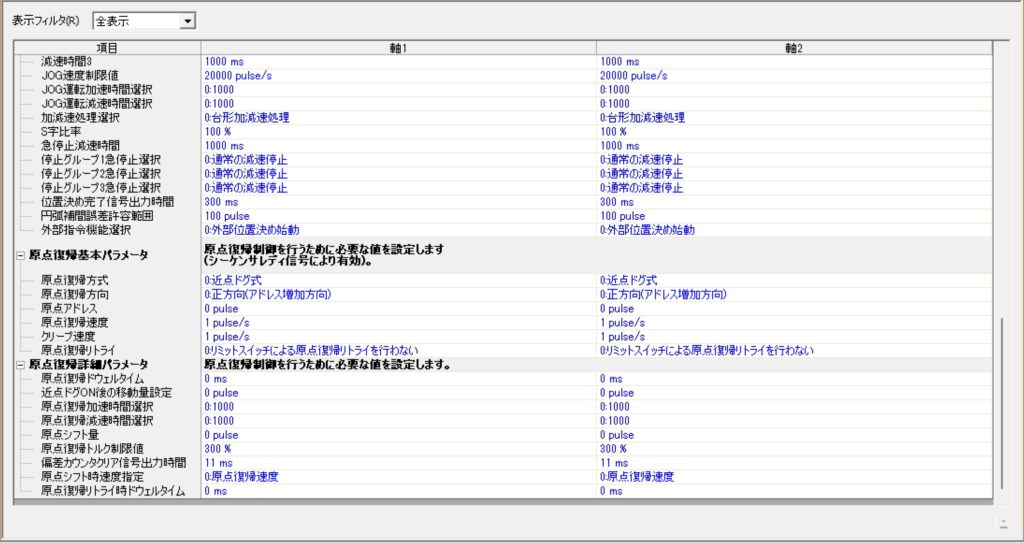
3.原点復帰動作
※0地点を原点位置にしています。
4.エラーコード表示
5.イネーブル機能確認
※制御停止
5項目を動作確認します。
SUMMARY
2回連続で・・・
位置決め制御を取上げました。
Micostep Driverは
説明書等は無し・・・
癖も無く、無事動作確認できました。
QD75P2は
まだマニュアルを読みましたが
全然機能と使用箇所は把握できていません・・・
機能が豊富で・・・
ただ・・・
専用命令がありますが・・・
使用しなくても・・・
バッファメモリー
(バッファメモリー=パラメータ)
を理解して使用すれば・・・
基本的な動作が可能です・・・
電気的な事ではなく
機械等も知らなければ・・・
制御も行き当たりばったりに・・・
雑な説明でしたが・・・
最後までお読みいただきありがとうございました。

